
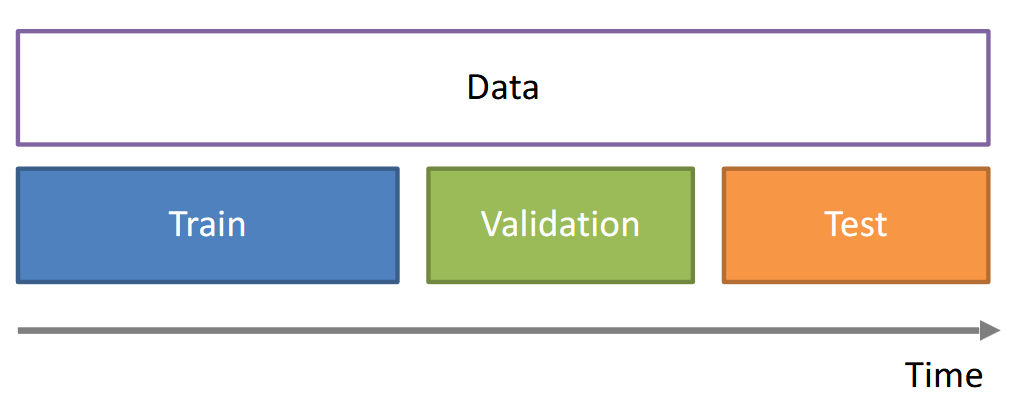
Sequential Data / Temporal Data
针对Sequential Data我们一般会这样划分机器学习的数据集,只用未来的数据进行测试:
Autoregressive Models
Motivation & Definitions
Motivation: 很多时间序列都有这种特点:
- 今天气温和昨天气温接近
- 今天销量会受前几天销量影响
- 今天利率、通胀、库存、流量,通常和前几天的数据有关系
所以就有了以下定义的 autoregressive model:
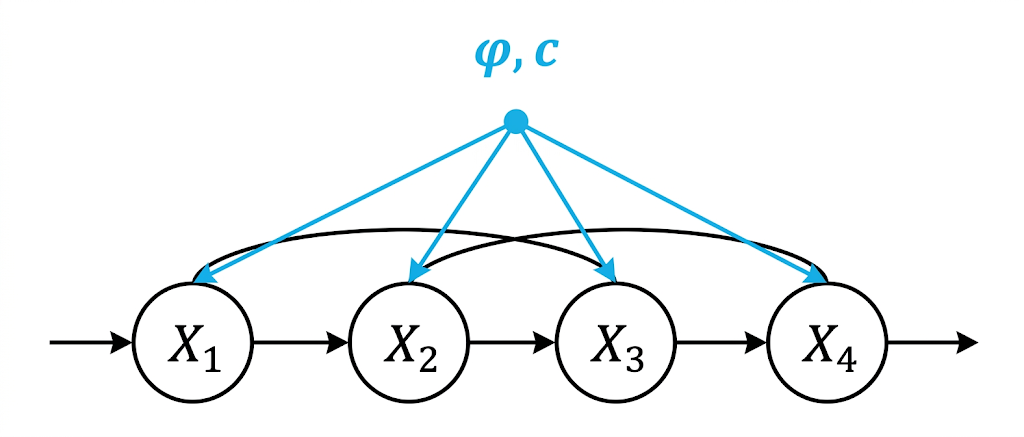
Definition: An autoregressive model AR(p) of order $p$ is defined as
where $\varphi_1, \ldots, \varphi_p$ are the parameters, $c$ is a constant, and $\varepsilon_t \sim N(0,\sigma)$ is white noise. The variable $X_{t-i}$ is the lagged value of $X$ at time $t-i$.
也可以写成:
注意,随着t增加,$\varphi_i$不变,但是会跟着一起”平移“:
对应的Graphical Model:
Definition:
The mean function of an AR model is $\mu(t) = E[X_t]$.
By default, it depends on $t$.The autocovariance is $\gamma(t,i) = \operatorname{Cov}(X_t, X_{t-i})$.
By default, it depends on $t$ and $i$.The autocovariance function can be normalized to give the Pearson autocorrelation function
It lies in $[-1,1]$.
参数学习(Parameter learning)
先假设$c=0$,不难发现对 $t = p, p+1, p+2, \ldots, T$,分别有::
写成矩阵的形式就是:
记成:
用OLS(ordinary least squares)的公式可得:
如果$c$不等于0的话,把$X$和$\varphi$调整成:
再套用公式即可。
Stationary
Definition:
A process is said to be stationary if
1.$E[X_t] = E[X_{t-i}] = \mu,\ \forall\ t,\forall\ i$(也就是$E[X_t] \equiv \mu \ \forall t$)
2. $\text{Cov}(X_t, X_{t-i}) = \gamma_i,\ \forall\ t,\forall\ i$
3. $E\left[|X_t|^2\right] < \infty,\ \forall\ t$
Theorem: Consider the stationary AR$(p)$ process
with $\epsilon \sim \mathcal{N}(0,\sigma^2)$. Then:
Proof:
1.
2,3.
因为$\epsilon_t,\epsilon_{t-i}$之间是independent,所以$\epsilon_t$也和之前的$X_{t-i}$是independent的:
从而得到
$\square$
在满足stationary的条件下,我们可以用Yule-Walker equations来学习参数:
Yule-Walker equations:
因为
所以这里的Yule-Walker矩阵也可以写成对称的形式:
具体流程:
1. 计算协方差$\gamma_0,…,\gamma_p$:
先估计均值:
然后用样本自协方差估计 moments:
2. 计算Yule_Walker矩阵的逆,解得$\varphi_1,…,\varphi_p$ (解方程)
3. 利用$\gamma_0$的公式来estimate $\sigma$:
注意到其实Yule-Walker矩阵本质上是一个协方差矩阵,假设
那么
Markov Chains
我们假设r.v $X_t$和time index都是离散的。
Definition: A Markov Chain is a sequence of r.v. $X_1, X_2, \ldots, X_T$ which fulfills the Markov property:
也就是说,当前状态出现的概率只取决于上一个状态。
Joint distribution则是:
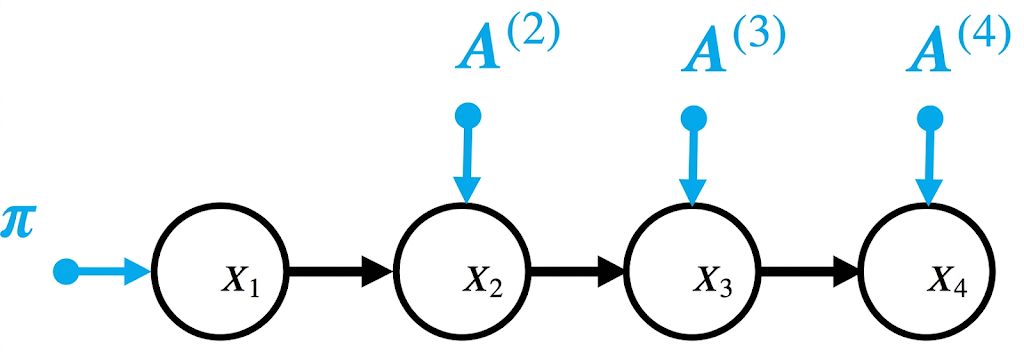
General的情况下,每个r.v的分布可能是不同的,也就是说
here $\pi \in \mathbb{R}^K$ is a prior probability on the initial state, and $A^{(t)} \in \mathbb{R}^{K \times K}$ are the transition matrices.
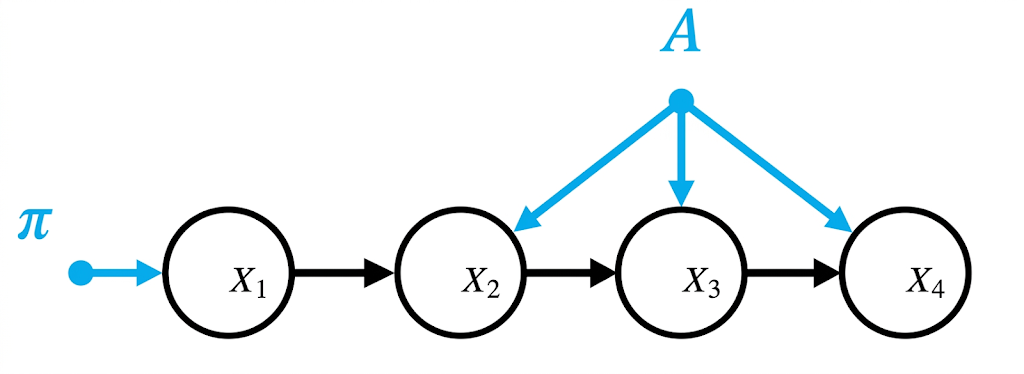
但是我们这里考虑简单点的情况:time-homogeneous / stationary Markov Chain
也就是$A^{(t)} \equiv A \ \forall t$。
Theorem:
Theorem:
参数学习(Parameter learning)
核心思路就是用MLE(maximum likelihood estimation)。
假设有$N$条观测序列:
每条的长度是$T_i$。比如说
对于每条观测序列都有:
所以
统计初始状态次数(多少条序列是从$i$开始的)以及状态转移次数($i$到$j$的次数):
于是
在满足$\sum_k \pi_k = 1$和$\sum_j A_{ij} = 1$的情况下maximize $\log P(\mathcal{D})$就会得到:
所以$\hat{A}$适合一行一行算。
例子:
统计一下:
所以可以得到
Hidden Markov Models
现实中很多系统的真实状态并不能直接被看到,我们只能通过观测来间接感知。
所以我们需要考虑当序列数据的真实状态看不见,只能看到带噪声的观测时,怎么建模、推断和学习参数。
比如说我们考虑一个观测飞机位置的例子:
- 真正的状态是位置、速度等物理量,是隐藏变量
- 传感器读到的是有噪声的位置,是观测变量
真实状态序列可能满足 Markov 性,但观测序列本身未必满足,所以需要 HMM。
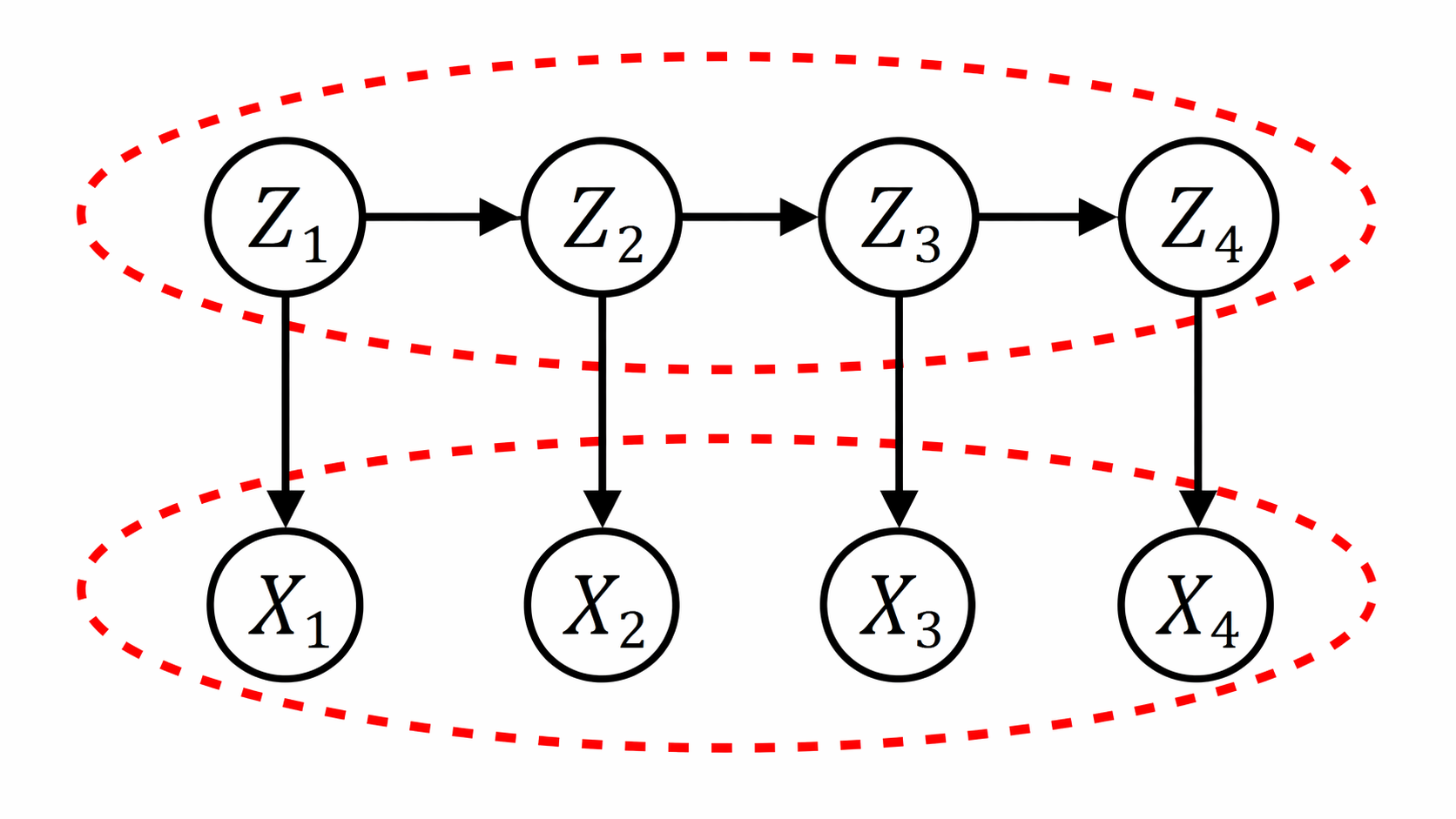
Definition: A Hidden Markov Model (HMM) is composed of a sequence of hidden/latent variables $[Z_1,\ldots,Z_T]$ and a sequence of observed variables $[X_1,\ldots,X_T]$ such that:
- The r.v. $Z_1,\ldots,Z_T$ satisfy the Markov property:
where $P(Z_{t+1}\mid Z_t)$ are the transition probabilities.
- Distribution of $X_t$ depends only on $Z_t$:
where $P(X_{t+1}\mid Z_{t+1})$ are the emission probabilities.
也就是说当前隐藏状态只依赖上一个隐藏状态,并且当前观测状态只取决于当前的隐藏状态。
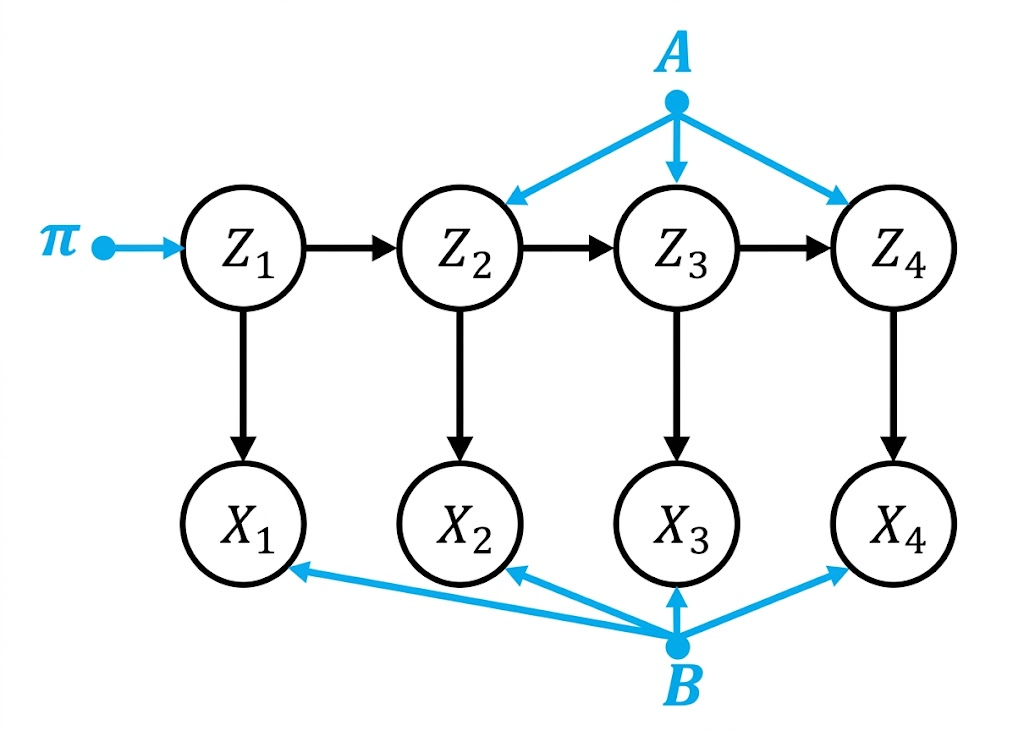
和之前一样,可以这样建模:
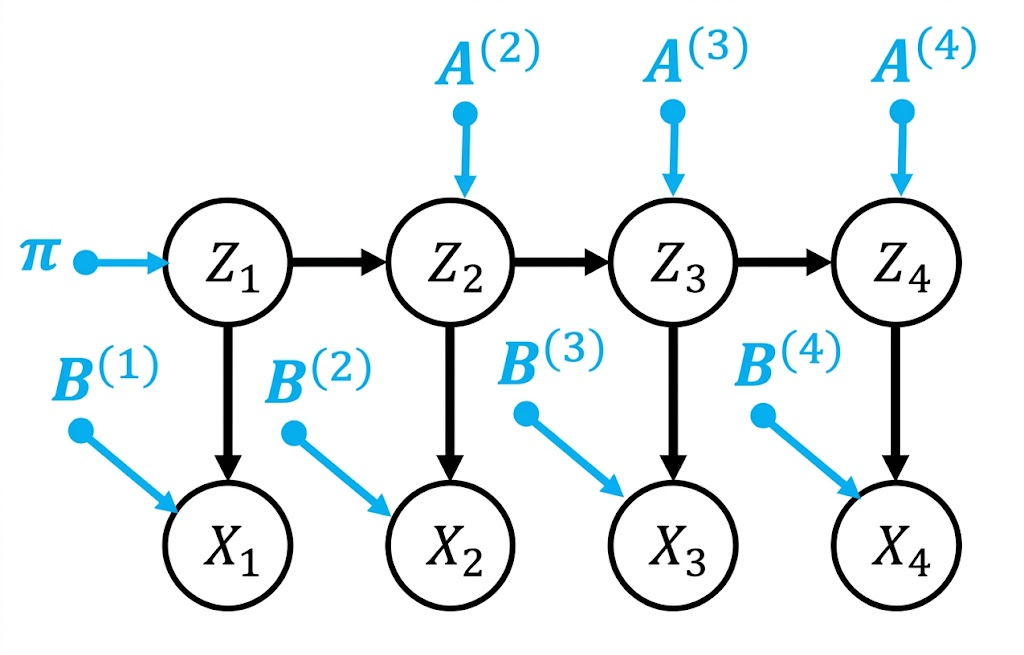
但为了降低参数数量,我们还是假设所有时间点共享一样的分布$A,B$:
在HMM中,我们一般有2种任务(都是假设已知观测数据$X_{1:T}$):
- Inference:参数($(\pi, A, B)$)已知,推导隐藏状态
- Parameter Learning:隐藏状态未知,学习模型参数
Inference
而Inference一般也分3种:
Filtering: computes $P(Z_t \mid X_{1:t} )$ online
只拥有到目前为止的所有观测信息,也就是及时判断。
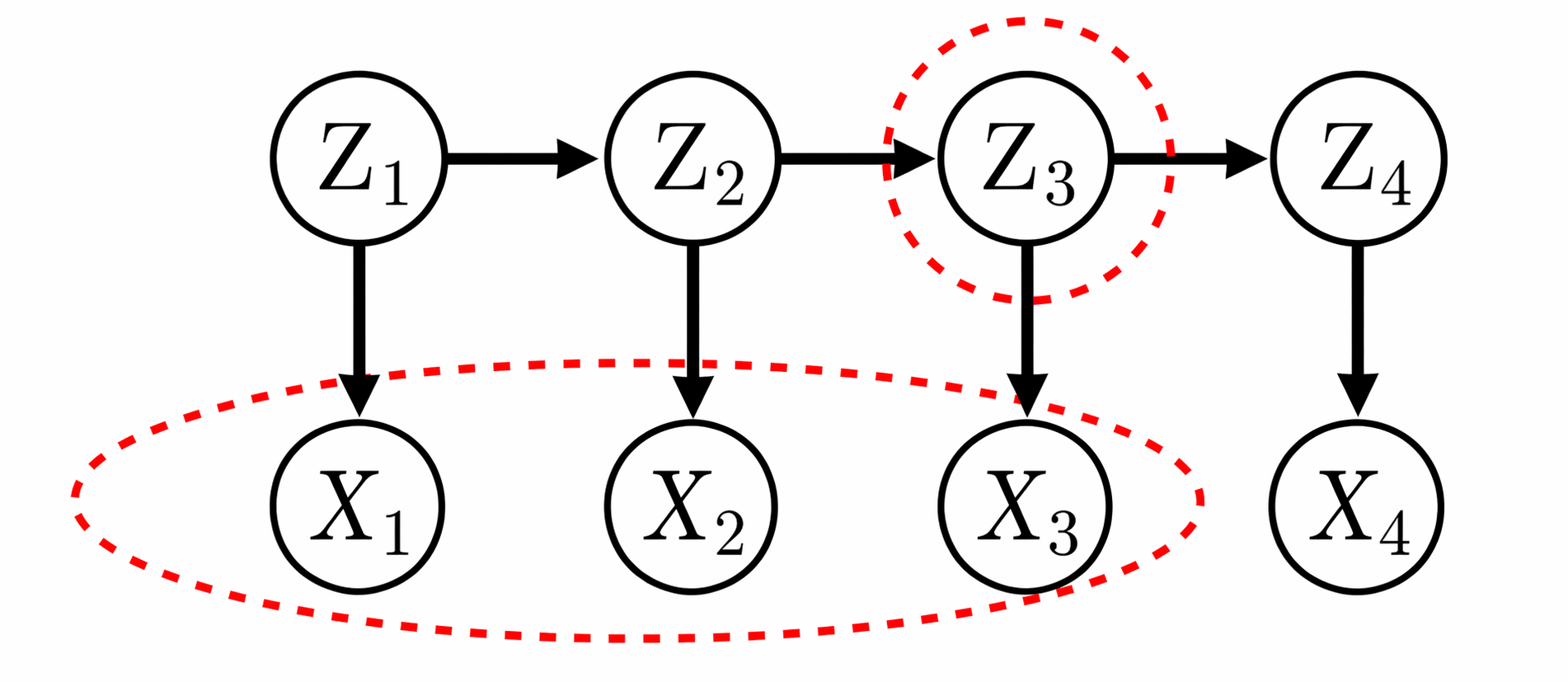
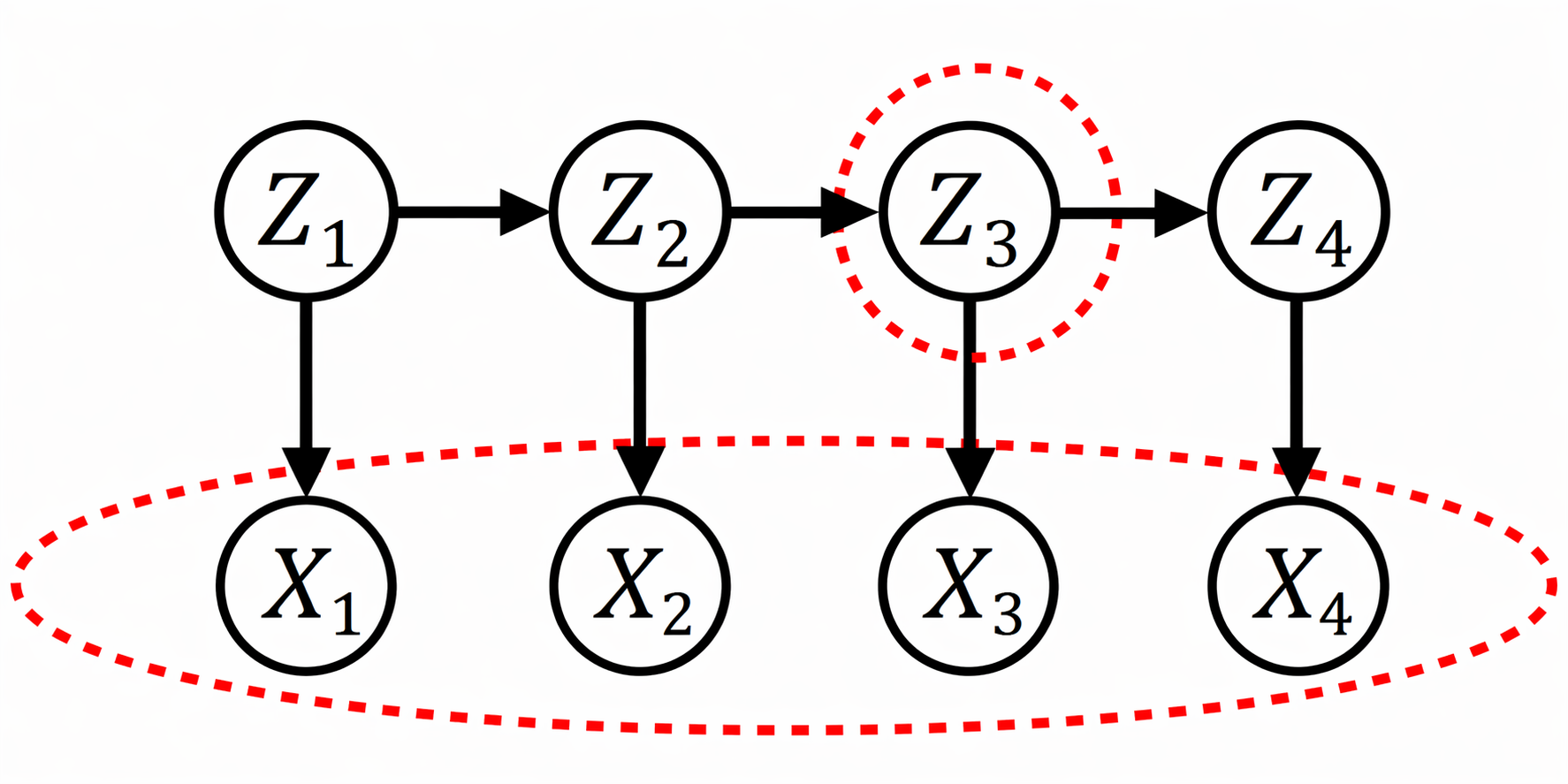
Smoothing: computes $P(Z_t \mid X_{1:T} )$ offline
拥有全部的观测信息,也就是事后回顾。
MAP inference: computes $\text{arg } \underset{Z_{1:T}}{\text{max}}P(Z_{1:T} \mid X_{1:T} )$
Filtering
computes $P(Z_t \mid X_{1:t} )$.
Forward Algorithm:
记
根据Bayes rule:
Forward Algorithm主要就分2步:
计算$\alpha_1$(initialisation):
给定$\alpha_t$,计算$\alpha_t$(recursion):
写成矩阵的话就是:
(其中$\odot$ denotes the Hadamard product:$(A \odot B)_{ij} = (A)_{ij}(B)_{ij}.$)
计算$\alpha_{1:T}$的复杂度为$O(TK^2)$。
Smoothing
computes $P(Z_t \mid X_{1:T} )$ .
Forward-Backward Algorithm:
在之前forward的基础上再定义一个$\beta$:
那么根据Bayes就有:
Backward Algorithm也分2步:
计算$\beta_T$(initialisation):
因为在$T$的时候:
$\alpha_T(k)$已经捕获了所有已知信息了,所以$\beta_T(k)$就需要是个常量。
给定$\beta_{t+1}$,计算$\beta_t$(recursion):
写成矩阵的话就是:
计算$\beta_{1:T}$的复杂度也为$O(TK^2)$。
最后计算
即可。
MAP inference
Viterbi algorithm:
注意到:
注意到每一项都只取决于$Z_t$和$Z_{t-1}$,所以我们可以把它转成一个图论里的最短路径问题:
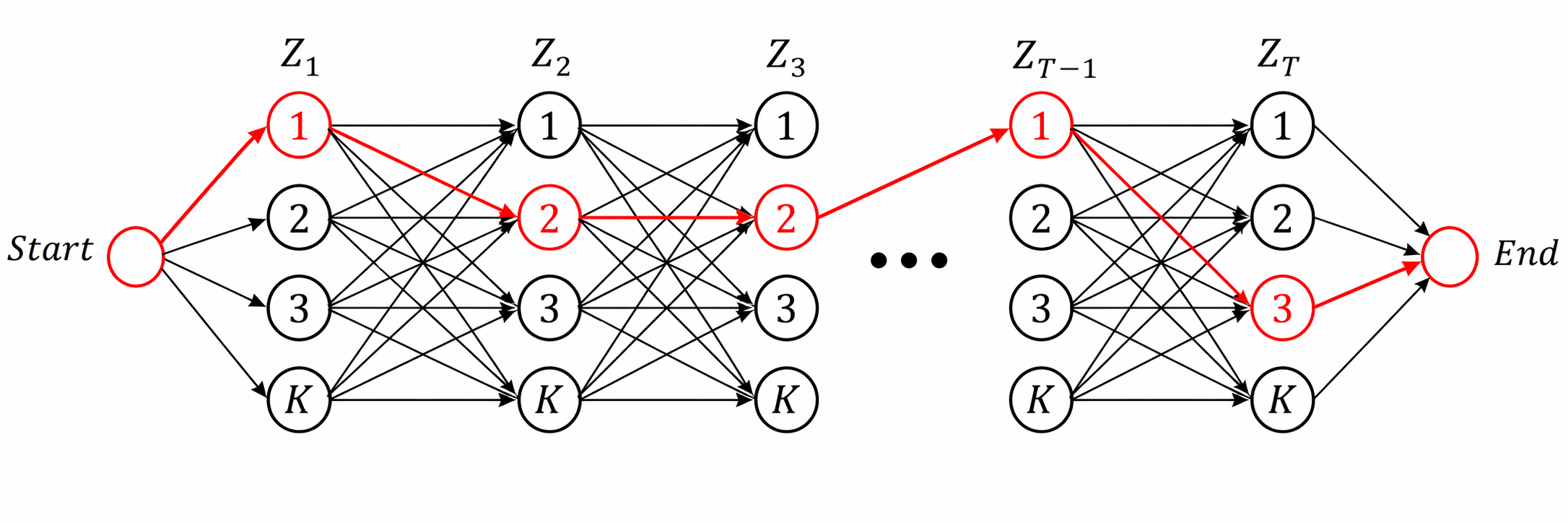
其中:
- 和start相连的边的权重:$-\log\left[ \Pr(Z_1=j)\Pr(X_1\mid Z_1=j) \right]$
- 中间层:$-\log\left[\Pr(Z_t=j\mid Z_{t-1}=i)\Pr(X_t\mid Z_t=j)\right]$
- 和start相连的边:$0$
复杂度依旧是$O(TK^2)$。
Parameter Learning
$X_{1:T}$已知,$Z_{1:T}$未知。
目标:求
也就是说虽然 $X$ 观测到了,但背后的状态序列 $Z_{1:T}$ 没看到,所以必须把所有可能的隐藏状态序列都加起来。但隐藏状态序列的可能数是指数级的,所以不能直接做。
但注意到这和GMM问题很像,所以我们考虑用EM算法求近似解。
Baum-Welch algorithm:
E step: evaluate the posterior:
其中
M step: maximize the expected joint log-likelihood
其中
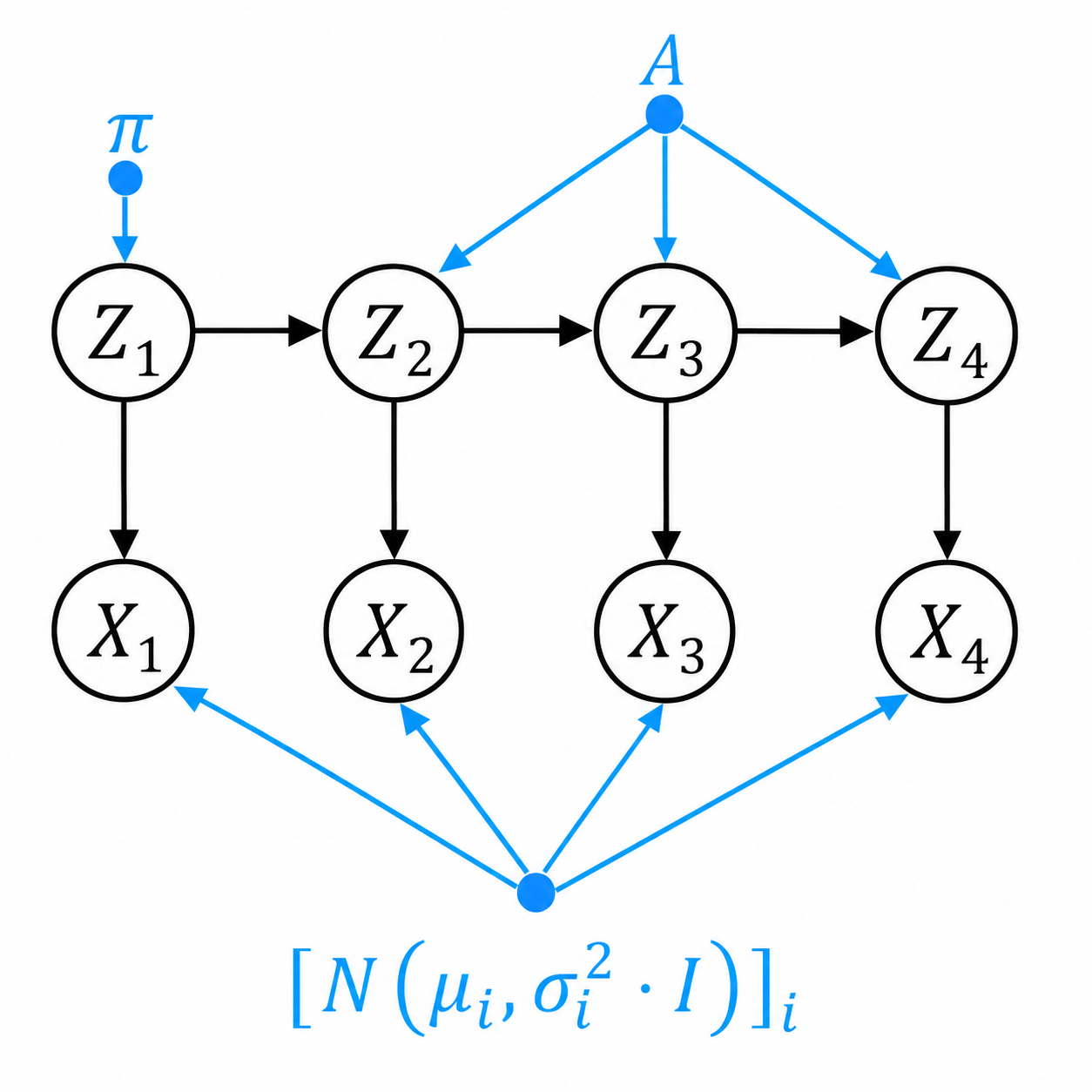
Continuous Data
我们之前假设的是离散的情况:discrete time $t \in \{1,2,\ldots,T\}$ and discrete r.v.$Z_t \in \{1,2,\ldots,K\}$, $X_t \in \{1,2,\ldots,K’\}$
我们现在关注discrete time $t \in \{1,2,\ldots,T\}$, discrete r.v. $Z_t \in \{1,2,\ldots,K\}$, and continuous $X_t \in \mathbb{R}^d$:
Inference部分基本不变,只需要把所有计算
的部分改成
即可。
而Parameter Learning的部分,E-Step没有变化,M-step需要一点调整:
而它的参数更新的公式:
和GMM里更新高斯参数的形式是等价/一样的。
唯一的区别就是:
- 在 GMM 里,不同观测样本$X_t$是独立的(independent)
- 在 HMM 里,观测 $X_t$ 在给定隐藏状态之后是条件独立的(conditional independent given $Z$)
Neural Network Approches
Word Vectors
由于神经网络不能直接处理单词,所以我们需要先把词表示成向量,方便后续计算处理。
最简单的想法就是one-hot encoding:假设有个单词数量为n的单词表,把每个单词转成一个维度为n的向量(其中有且仅有一项等于1)。但它有三个问题:维度高、稀疏、假设词之间相互独立。
于是就引出了 word vectors / embeddings:相似词的向量应该接近,比如 “hotel” 和 “motel”,”man”和”woman”,”walking”和”walked”。这基于分布式假设:出现在相似上下文中的词,通常有相似含义。
有2种常见的获取word vectors的方法:
1. Co-occurence Matrix + SVD:
这个方法偏统计。它的初始想法很直观:一个词的含义可以通过“它经常和哪些词一起出现”来表示。
先统计一个词附近出现哪些词,得到一个co-occurrence matrix。然后再用SVD把高维稀疏向量压缩成低维稠密向量。
优点是相似的单词会得到相似的向量。
缺点是计算慢,而且新词不好加入。
2. Word2Vec
这种方法偏预测。
先设计一个预测任务,然后用神经网络学习词向量。
来看2个经典模型:
1. CBOW (Continuous Bag-of-Words):
给定一个词周围的上下文词(window),预测中间词。
但是这种方法对稀有词不太好,因为稀有词出现次数非常少,模型很少有机会把它作为要预测的目标词,所以不容易学好它的向量。
2. Skip-gram:
给定中心词,预测它周围的上下文词。
它对稀有词更友好(可以这样理解:如果一个 rare word 出现了,模型会强迫自己用这个 rare word 去预测它的上下文。这样模型必须理解这个 rare word 通常出现在什么环境中,因此更容易学到它的含义。),但训练起来也会更慢。
来看一下具体的结构:
假设词表大小是$N$,并且每个词一开始用one-hot vector来表示。
Embedding则是通过一个矩阵$U \in \mathbb{R}^{N \times D}$来实现的。由于所有输入都是one-hot vector,所有相当于$U$的每一行都是对应一个单词的embedding结果的。
在此基础上还需要一个矩阵$V \in \mathbb{R}^{D \times N}$,用来把中心词 embedding 转换成对整个词表的预测分数。最后再套上softmax就会得到一个上下文单词的概率分布。
也就是整体流程是这样的:
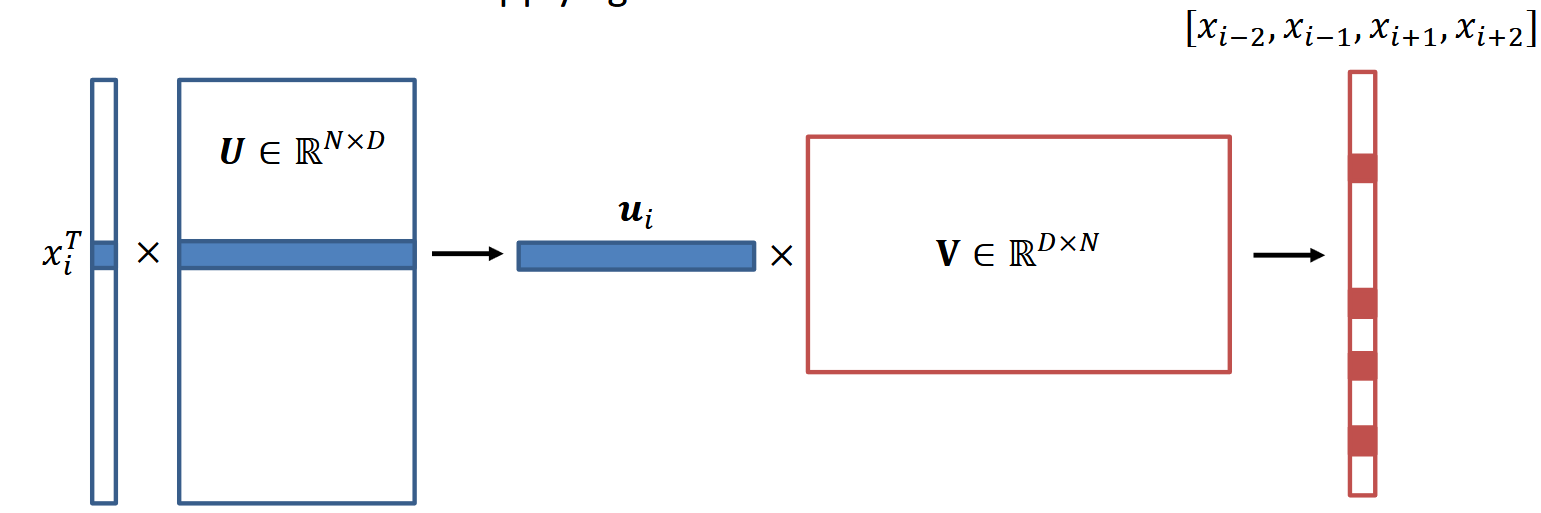
假设$S=[x_{i-l},\ldots,x_{i-1},x_{i+1},\ldots,x_{i+l}]$是当前$x_i$的大小为$l$的window,$\theta = (U,V)$为模型参数,那么我们的训练目标就是最大化这个期望值:
其中
但是注意到,softmax的形式是:
为了计算这个分母我们需要遍历整个单词表,当单词表很大的时候会非常低效。
所以可以用negative sampling技巧:我们不再把问题看成从整个词表中预测正确上下文词,而是把它变成一个二分类问题:判断一个词对是不是真实的上下文关系。
利用(最小化)这个Loss来训练模型:
并且用sigmoid代替softmax:
如果两个词经常一起出现,它们的向量点积应该大,sigmoid 后接近 1。
如果两个词很少一起出现,它们的向量点积应该小,sigmoid 后接近 0。
RNNs
我们刚才看了如何处理单个单词。但我们该怎么处理一整句话、一个音频片段、一个时间序列呢?尤其是它们的长度都各不相同。
比如说当我们希望它接收输入:
,并且输出
答案就是Recurrent Neural Networks (RNNs)。它的基本想法是用一个 hidden state 来总结到目前为止读过的序列信息。
RNN可以处理多种任务:
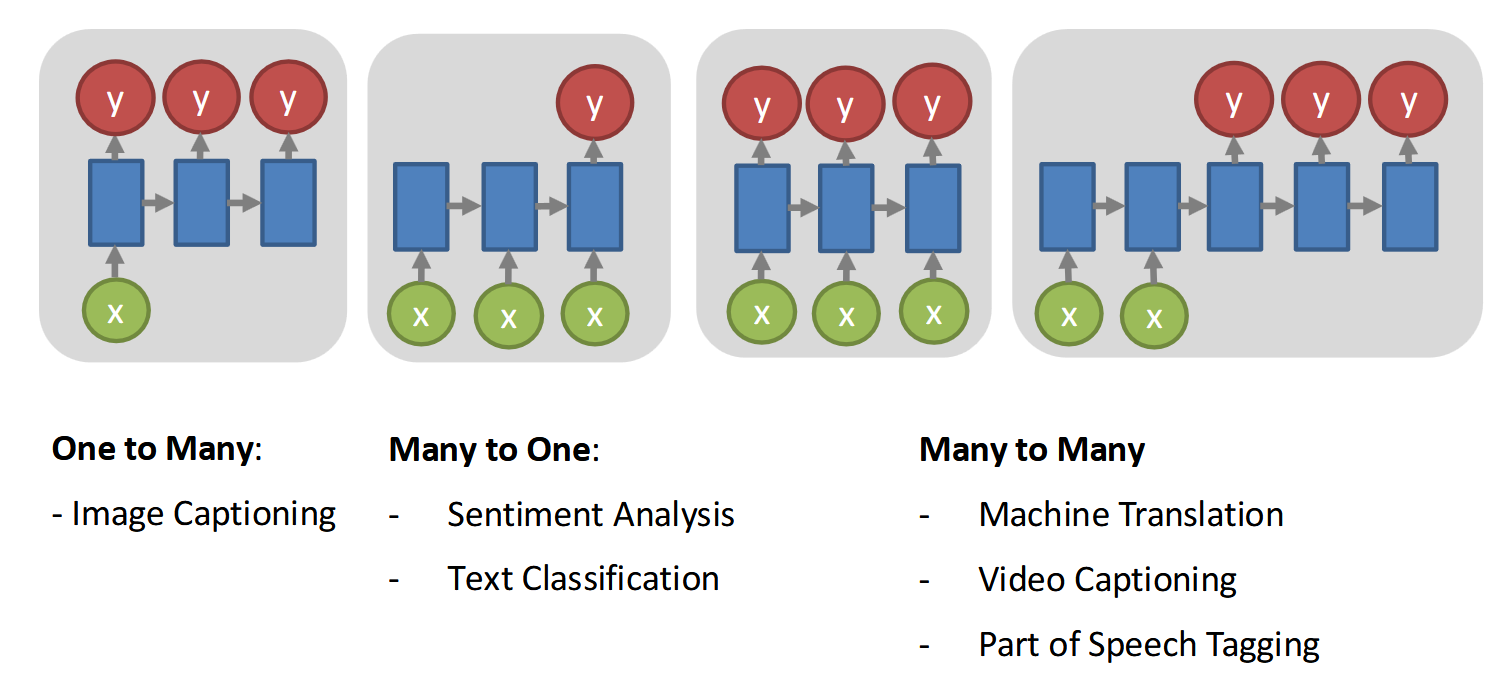
来看正式的定义:
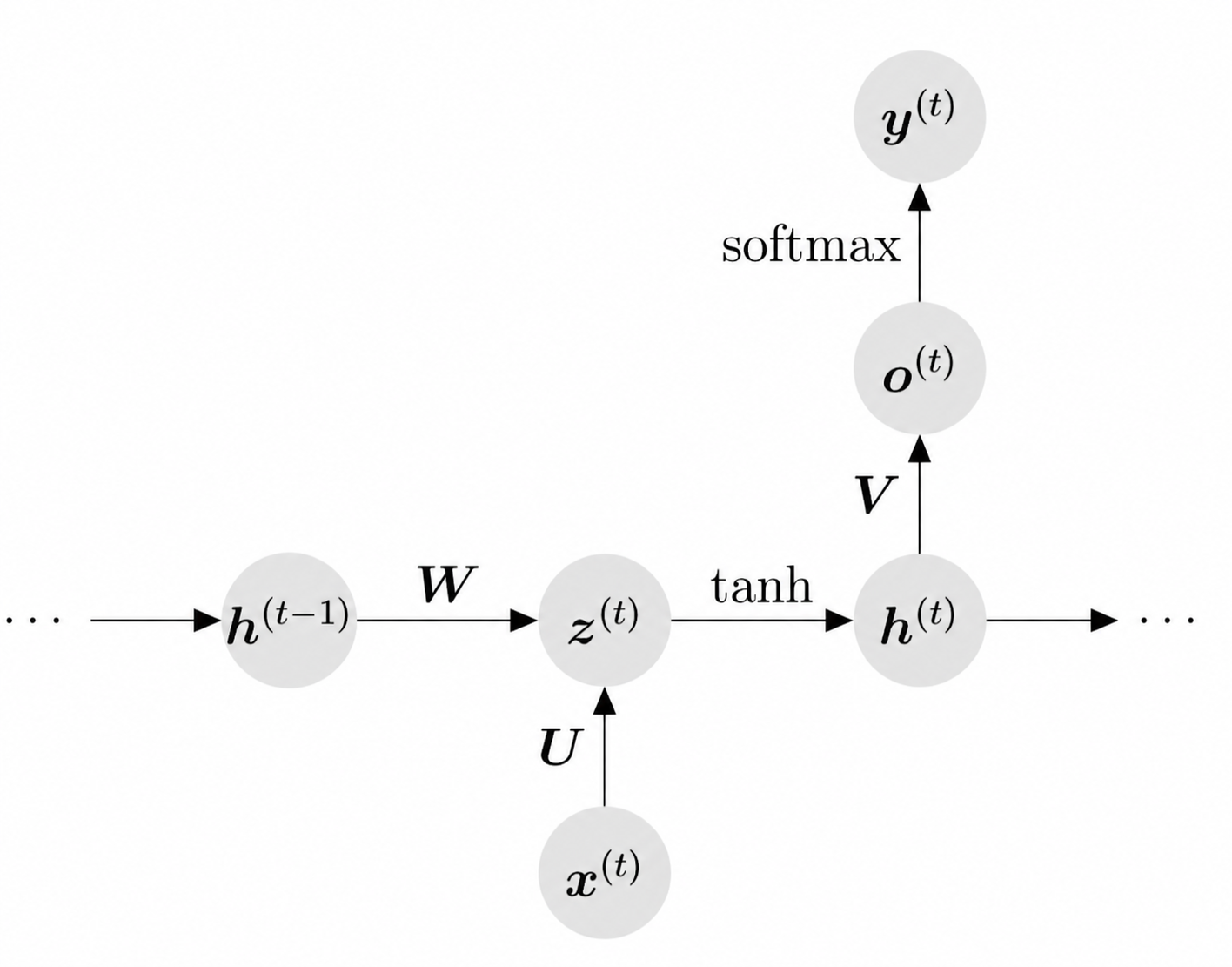
假设输入是$\{x^{(1)},\ldots,x^{(T)}\}$,并且输出$\{y^{(1)},\ldots,y^{(T)}\}$。我们现在希望知道
的概率分布。
所以我们用 $h^{(t-1)}$表示/记录$\{x^{(1)},\ldots,x^{(t-1)}\}$的信息。
具体的更新公式:
训练的时候关注negative log-likelihood:
当我们将RNN展开(unrolling):
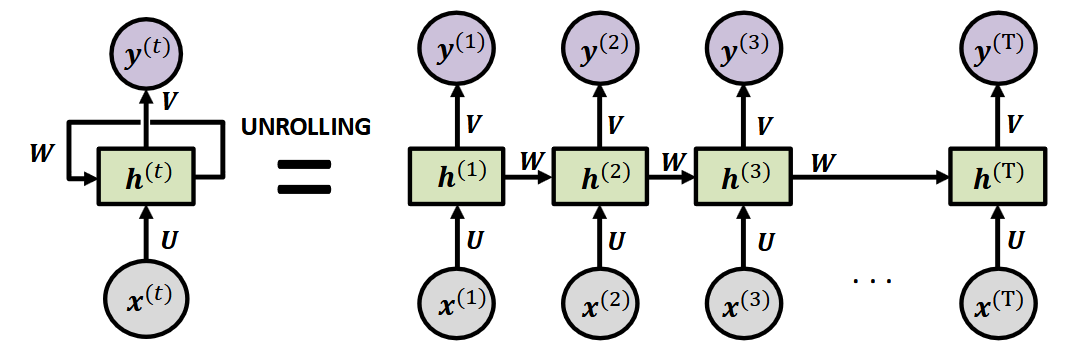
就会发现它像一个很深的神经网络,所以可以用反向传播训练。
假设真实标签$y^{(t)}$用的是one-hot label(即其中只有一位等于1,其余位均等于0),$\hat{y}_c^{(t)}$为每轮训练时得到的softmax之后的分布,那么$L^{(t)}$就可以写成
来计算它的导数。
先看$\frac{\partial L^{(t)}}{\partial o_i^{(t)}}$:
所以
再来看$\frac{\partial L^{(t)}}{\partial V^{(t)}}$
类似的有:
但注意到里面用到的$h^{(t)}$是递归定义的:
所以当计算$\frac{\partial L}{\partial h^{(t)}}$时:
其中
$W$的连乘会导致这个梯度消失或者爆炸(vanish/explode),进而会导致RNN无法有效地更新/学习到信息。
为了解决这个问题我们需要完善目前的架构。
GRU (Gated Recurrent Unit)
核心思想:不是每一步都完全覆盖 hidden state,而是引入gate来控制保留多少旧信息以及接受多少新信息。
(有点类似residual NN的idea。)
更新公式:
其中$\odot$为elemente-wise product。
update gate $z^{(t)}$会决定最后是保留更多的previous state还是新的candidate state。
reset gate $r^{(t)}$则是决定计算新的candidate state时,参考多少之前的hidden state的信息。
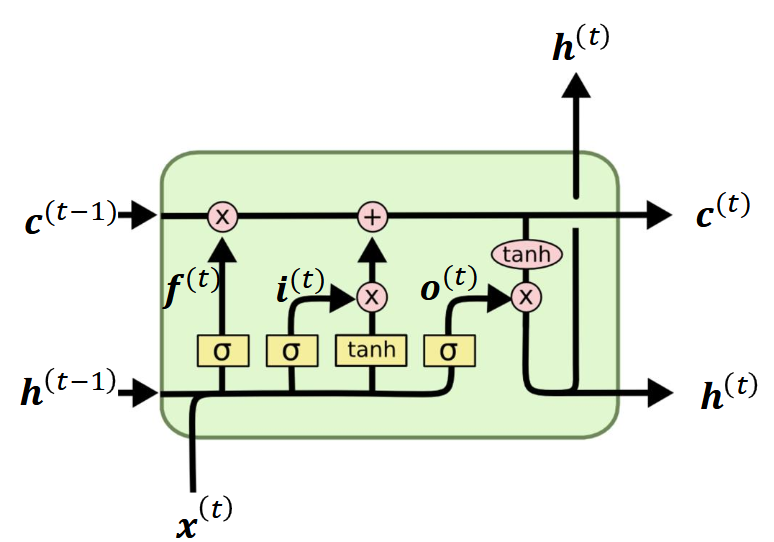
LSTM (Long Short-Term Memory)
更加强力的架构。我们在hidden state $h^{(t)}$的基础上再引入一个新的cell state $c^{(t)}$。
Forget gate:
决定保留多少之前的cell state信息。
Input gate:
决定将多少新信息写入新的cell state。
Output gate:
决定更新hidden state时参考多少cell state的信息。
Update cell state:
Update hidden state using cell state:
Non-Recurrent Modesl (ConvNets, Transformer)
RNN的结构:
会带来2个问题:
- 无法并行计算,因为每个hidden state都依赖前面的state
- 无法保证长期
但有些序列任务其实不一定需要完整历史,只需要一个固定范围的过去信息。
ConvNets/WaveNet
连续函数上的卷积是:
在图像处理中,我们常见2D(离散)卷积:
因为sequence是1维的,所以我们可以用1D的ConvNets。
假设有一个长度为 $3$ 的卷积核:
对于序列:
普通1D卷积会在序列上滑动窗口。例如某个输出可能是:
这和之前的autoregressive model非常像,但ConvNet可以叠很多层、加非线性,从而学习更复杂的模式。
WaveNet是一个用 1D ConvNet 建模 speech / raw audio 的模型。它有两个关键设计:
Causal convolution
确保卷积只能看到之前的信息。
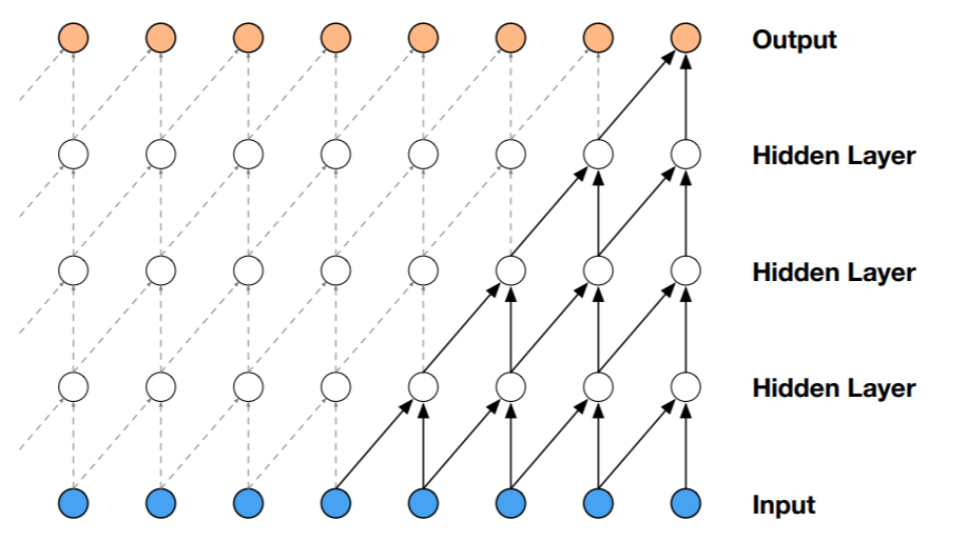
Dilated convolution
(在序列模型里,某个输出 $y_t$ 能看到多少个输入位置,就叫它的receptive field。)
普通卷积看连续相邻输入:
而 dilated convolution 会“隔着看”。
比如 dilation $=2$ 时,可能看:
dilation $=4$ 时,看:
WaveNet常用的做法是每一层dilation翻倍:
这样receptive field会随着层数指数级增长。这样便可以只用少数层就能覆盖很长历史。
Transformer&Attention
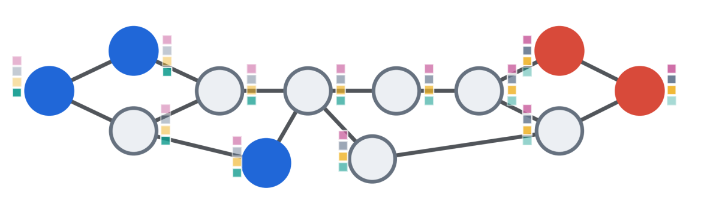
Transformer 是非循环模型。它不像RNN那样一步一步更新hidden state,也不像ConvNet那样只看固定窗口,而是用attention让每个token可以直接和其他token交互。
对于当前位置 $x_i$,模型会学习
- 应该关注序列中哪些位置 $x_j$?
- 每个位置关注多少?(权重 weight)
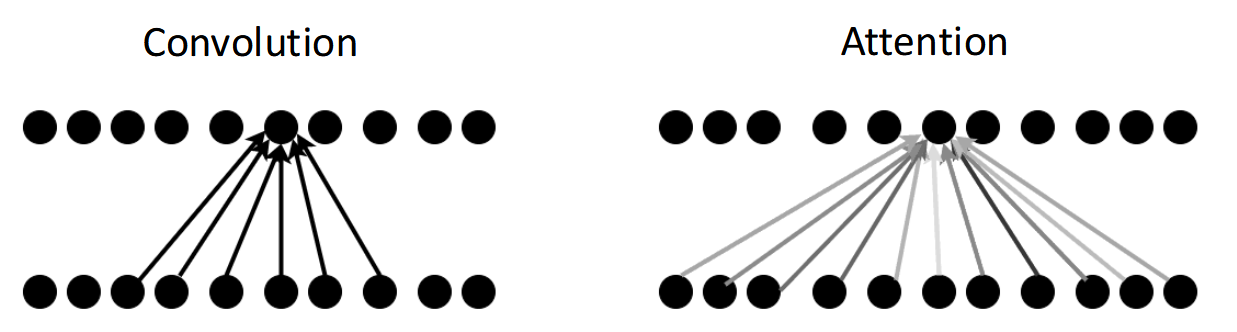
(attension中不同深浅的颜色代表不同的重要程度/权重)
Attension有三个核心概念:
也就是:
- Query
- Key
- Value
可以用一个比喻理解:
Query:我在找什么?
Key:我有什么特征,可以被别人匹配?
Value:如果别人关注我,我实际提供什么信息?
attension的具体计算过程:
第一步,计算 $x_i$ 对每个 $x_j$ 的分数:
分数越高,表示$x_i$越应该关注$x_j$。
第二步,对这些分数做 scaling 和 softmax:
这里$\alpha_{ij}$是attention weight,表示位置$i$对位置$j$的关注程度。
第三步,用这些权重加权value:
得到当前位置的新表示$z_i$。
用矩阵的写法则是:
其中$QK^T$是 $n \times n$ 的矩阵。
由于Attention本身无法察觉顺序,所以我们需要加入Positional Encoding,也就是给每个token的embedding加上或拼接一个表示位置的向量。
与RNN相比,Transformer有一个非常重要的特性:训练时可以并行。RNN必须按顺序处理每个token,因为每一步的输出都依赖上一步的隐藏状态;而Transformer没有这种时序依赖,可以一次性把整个序列喂进去同时计算。
但这里有个问题——语言模型在预测某个token时,不应该”提前看到”它后面的内容,否则训练就失去意义了。解决办法是使用causal mask(因果掩码):在注意力计算中,将每个位置右边的部分遮住,强制模型只能关注当前及之前的token。
以训练句子”I like this movie”为例:
I只能看Ilike只能看I, likethis只能看I, like, thismovie只能看I, like, this, movie
这四个位置的计算在训练时是同时进行的,效率远高于RNN的逐步处理。
不过,这种并行性只存在于训练阶段。推理时,由于每个新token都依赖前面已生成的结果,模型仍然只能一个token一个token地顺序输出。
Stuctured State Space Models
先来对比一下前面的RNN和Transformer架构:
| Training 训练 | Inference 推理 | |
|---|---|---|
| RNN | 慢 | 快(只需要根据当前的hidden state来计算下一个hidden state) |
| Transformer | 快(可并行) | 慢(复杂度差不多是序列长度的平方) |
那么有没有办法可以设计一个架构同时拥有它们2个的优点呢?
State-space model
考虑输入$u_k \in \mathbb{R}$,输出$y_k \in \mathbb{R}$,以及$\bar{A}\in\mathbb{R}^{N\times N}, \bar{B}\in\mathbb{R}^{N\times 1}, \bar{C}\in\mathbb{R}^{1\times N}$。
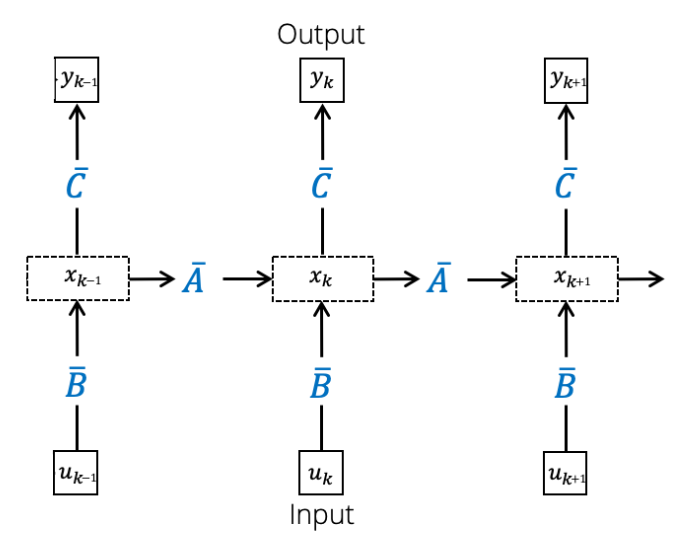
注意到$y_k$可以写成
等价于$\bar{K}$和$u$的卷积:
重点来了,目前的这个架构有着2种等价的形式,所以同时拥有着2种形式的优势:
递归
推理时很高效,复杂度为线性。
卷积
训练时可以并行,因为整段序列的卷积可以一次算。
但是光这样还不够,因为在计算$\bar{K}$时实际上需要计算$\bar{A}^{L-1}$,复杂度依旧很高。
所以我们可以挑选合适的$\bar{A}$的结构来确保复杂度不会太高。
S4 model
S4 (Structed State Space for Sequences) model。
Event Data Modeling
之前考虑的都是数列的值,也就是$x_{t_1},x_{t_2},…$。我们现在来考虑时间(也就是index本身)。
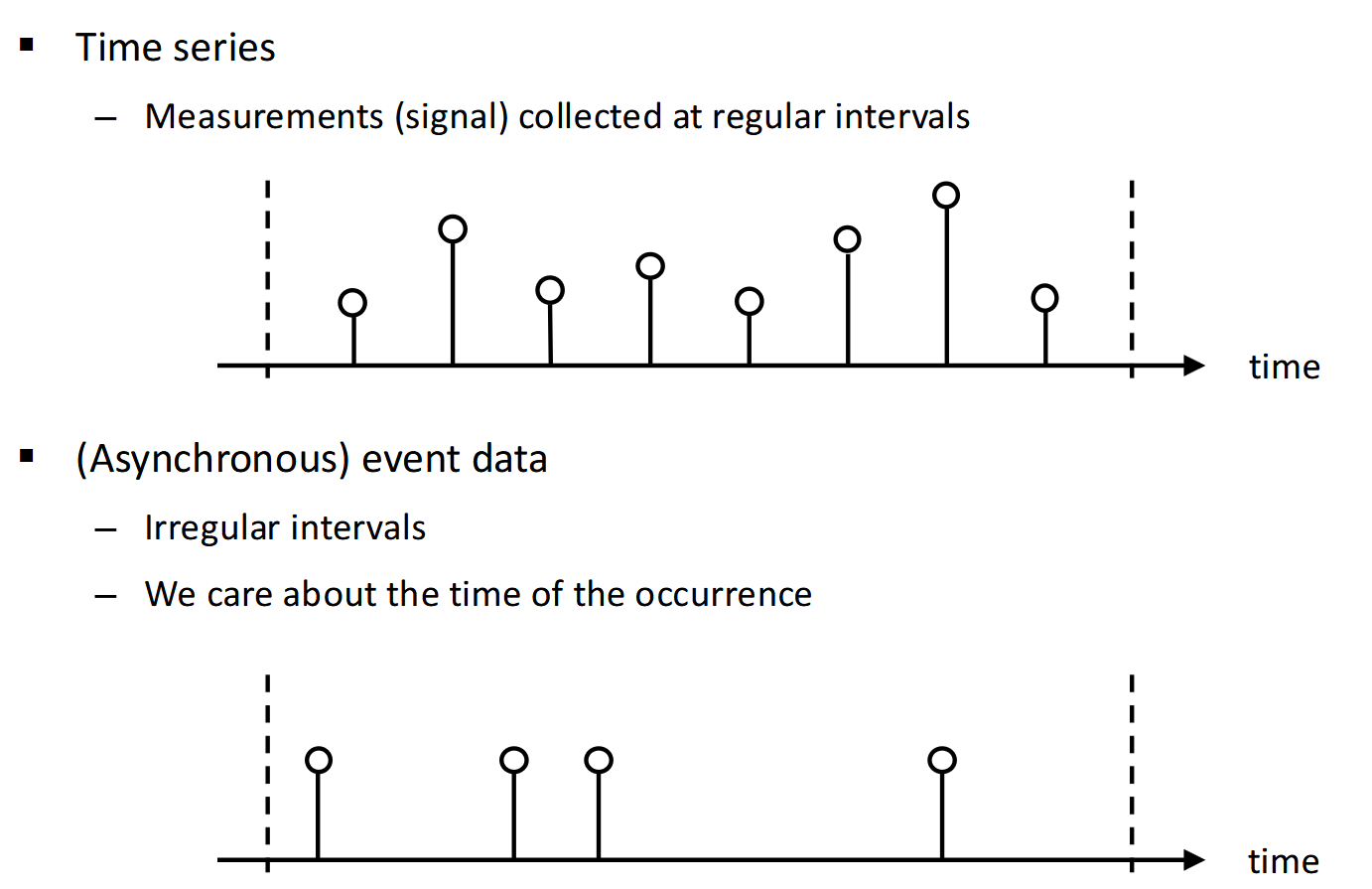
也就是我们现在有一些event,然后我们希望预测下一个event会在什么是发生。
Definition: Temporal Point Processes (TPP) are a class of probabilistic models that describe the distribution of discrete event sequences in continuous time.
TPP defines a generative model for variable-length sequences
on the interval $[0,T]$, with likelihood function $p(\{ t_1,…,t_N \})$.
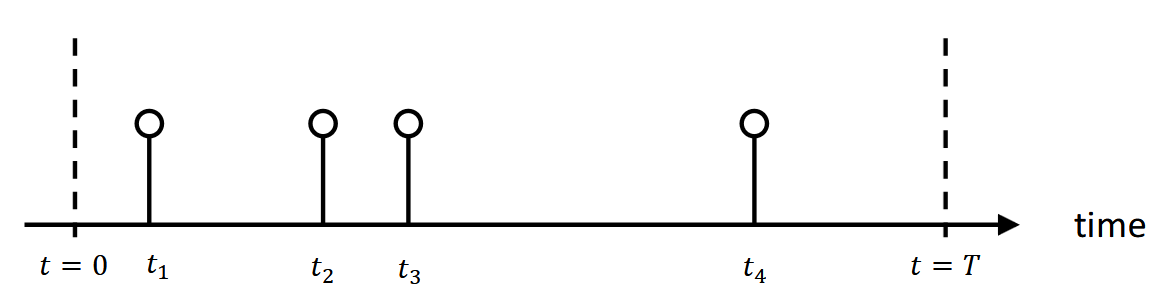
记历史事件为$\mathcal{H}(t) = \{ t_j < t \} = \{t_j \mid t_j < t \}$。那么模型描述的conditional density(下一个事件发生的时间概率分布)就是
并且不难注意到:
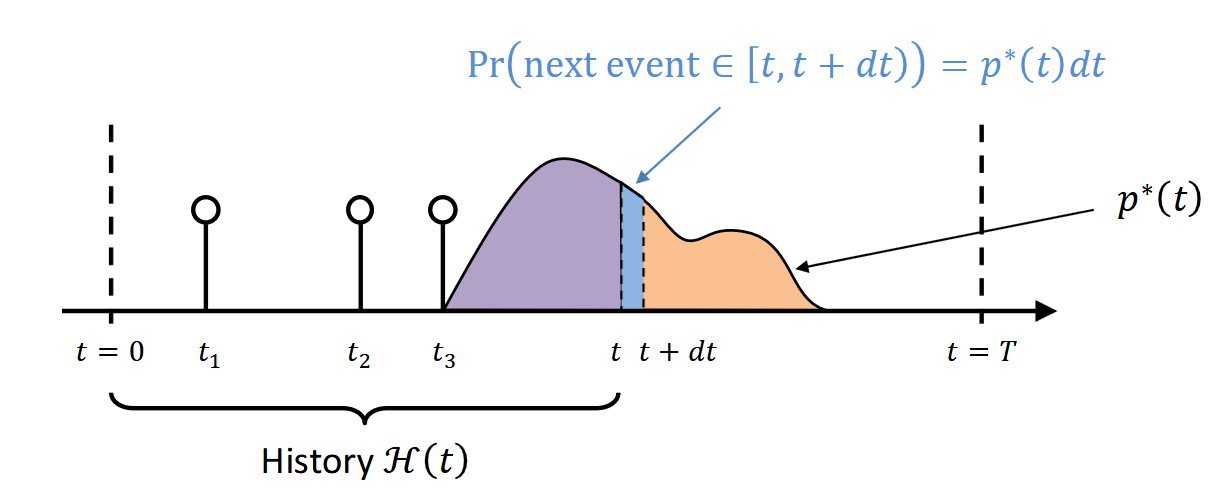
(严格来讲图里的$\mathcal{H}(t)$应该只画到$t_3$那里。)
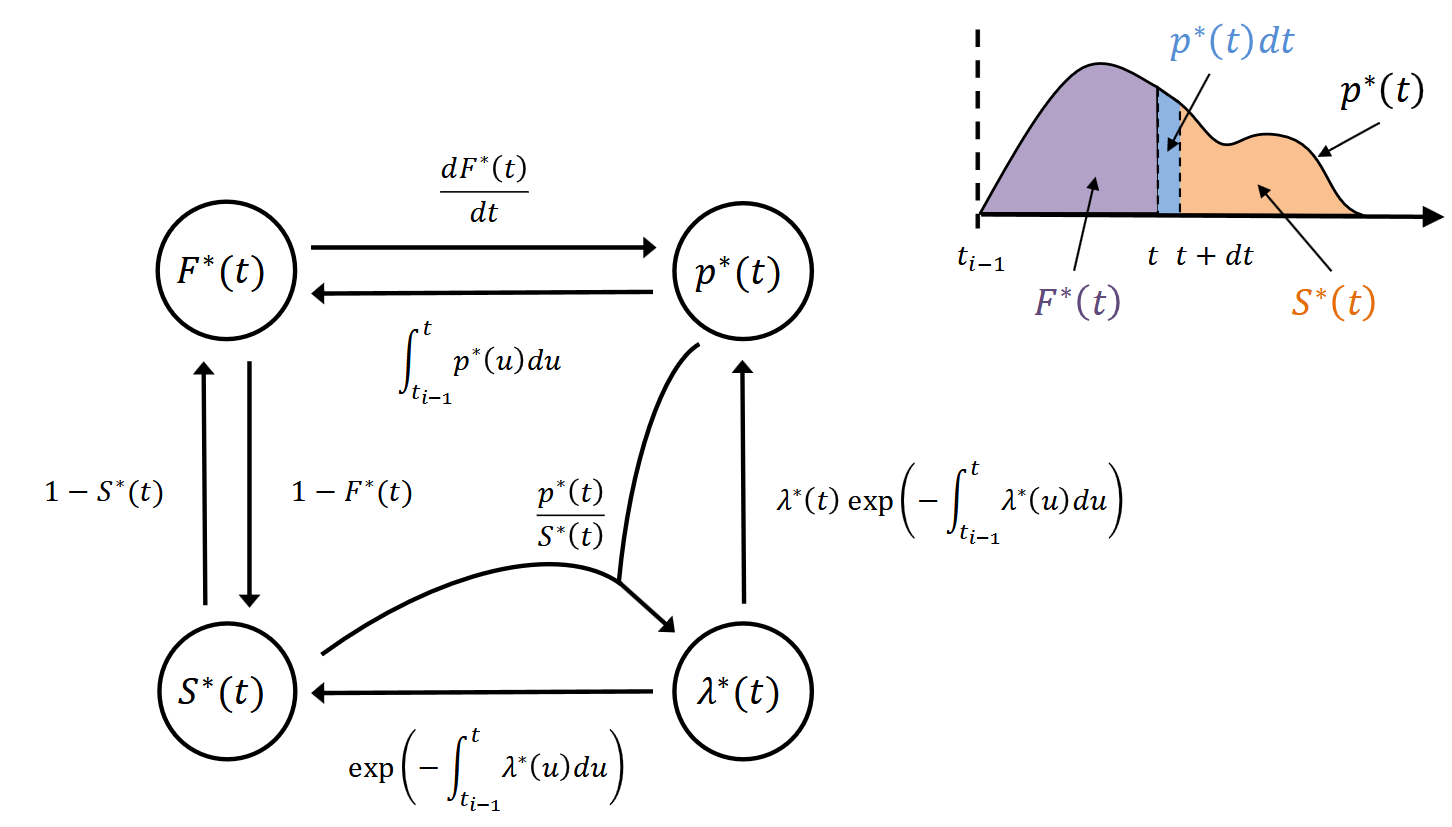
CDF:
为下一个时间发生在$[t_{i-1},t)$的概率。其中$t_{i-1}$为$t$之前的最后一个事件(的时间)。
Survival function:
为下一个时间不发生在时间$t$之前的概率,或者说下一个时间发生在$t$之后的概率。
conditional intensity function:
在已知$[t_{i-1},t)$中没有发生事件的情况下在$[t,t+dt)$中发生事件的概率。
($\int_t^{t+dt} p^(t)dt$有时候会被省略成$p^(t)dt$。)
也就是:
这几个函数之间的关系:
那么该怎么计算一个realization的概率呢?
Selected TPP Models
用$\lambda^*(t)$建模
如果用$\lambda^*(t)$来定义模型,有几个好处:
- 容易设计具有特定行为的模型,例如全局趋势、爆发性、排斥性。
- 强度函数比较可解释。
- 不同过程可以组合,例如两个强度相加。
- 采样可以更高效。
Homogeneous Poisson Process(HPP)
假设强度恒定:
服从指数分布:
记$\tau_i = t_i-t_{i-1}$,那么
模拟HPP很简单:不断从指数分布采样间隔 $\tau_i$,然后累加得到事件时间:
1 | arrival_times = [] |
复习一下一个定理:
Theorem (Inverse CDF Transform):
设
设 $F:\mathbb{R}\to[0,1]$ 是某个随机变量的累积分布函数(CDF),定义广义反函数,即quantile function:
令
则 $X$ 的累积分布函数为 $F$,也就是说:
换句话说:
所以取样(Sampling)的话就很简单:
取$u \sim \operatorname{Uniform}(0,1)$,那么
HPP 适合描述“事件均匀随机发生”的场景,但表达力很弱。
Inhomogeneous Poisson Process (IPP)
IPP 允许强度随时间变化:
不依赖历史,但可以捕捉全局趋势。
而事件的数量满足Poisson分布:
假如有2个IPP的intensities是$g(t)$和$h(t)$,那么它们的和也是IPP并且intensity就是$g(t) + h(t)$。
Hawkes Process
也叫自激励过程(self-exciting process)。它的intensity等于
其中
被叫做Triggering kernel。并且参数$\mu, \alpha, \omega \geq 0$。是依赖历史记录的。
Hawkes Process 的核心特点是 self-exciting。一个事件发生后,会暂时提高后续事件的发生概率,然后这个影响逐渐衰减。因此它适合建模 bursty、clustered 的现象,比如社交媒体转发、地震余震、金融市场连锁交易、用户连续发消息等。
参数估计/学习
最大化训练集中所有序列的 log-likelihood:
其中
建模$p^*(t)$
因为用$\lambda^(t)$建模的话计算log-likelihood部分需要算积分,复杂的情况下会无法计算。所以我们也可以直接用RNN建模$p^(t)$。
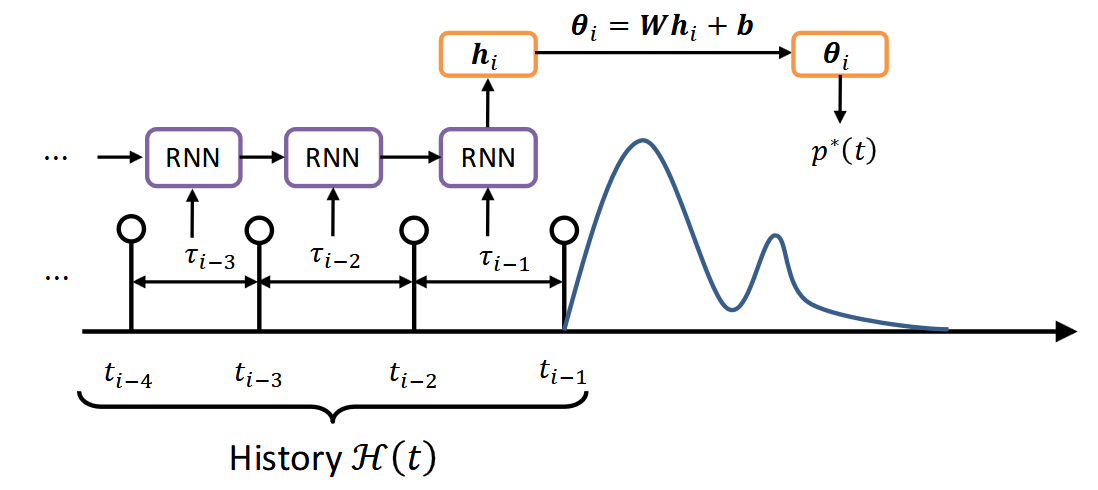
利用RNN来记录evnt时间差的历史,并基于这个历史得到$p^*(t)$的分布。
但这样autoregressive TPP还是有几个(和之前RNN类似的)问题:
第一,误差累积。预测下一个事件错了,后面基于它继续预测会越错越远。
第二,计算复杂度高,因为要一步步生成事件。
第三,难以建模长距离依赖,尤其是很早以前的事件对很久之后事件的影响。
再来看个变种:ADD and THIN: Diffusion for Temporal Point Processes。
Noising 阶段:
从真实数据样本 $\mathbf{t}^{(0)}\sim \lambda_0$ 开始,每一步做两件事:
- Thin:随机删除一部分已有事件。
- Add:从 HPP 添加一些噪声事件。
经过很多步后,原始事件序列逐渐变成一个简单的 HPP 噪声分布:
Denoising 阶段:
从噪声事件序列开始,逐步采样回更干净的事件序列,最终恢复数据分布:
Graphs
Ranking
核心问题:该怎么给节点排序?
最典型的例子就是 Web 网页排序。互联网可以看成一个巨大的有向图:网页是节点,超链接是边。问题是,面对海量网页,怎么判断哪个网页更“重要”?
PageRank
PageRank 的核心递归思想是:A page is important if many importants pages point to it。如果有很多重要页面指向某个页面,那么这个页面就很重要。
这是一种“投票”机制:每个页面会把自己的重要性分给它指向的页面;如果一个页面有很多出边,它的投票会被分摊。也就是说,如果页面 $i$ 的 PageRank 是 $r_i$,出度是 $d_i$,并且它指向页面 $j$,那么它给 $j$ 的贡献是:
因此页面 $j$ 的排名分数是所有指向它的页面贡献之和:
这里 $d_i$ 表示节点 $i$ 的出度。
直观理解:
如果一个非常重要的网站只链接到少数几个页面,那么它给每个被链接页面的“投票”很强;如果一个页面本身不重要,或者它链接出去很多页面,那么它对单个页面的贡献就小。
不能发现最后所有的等式会组合成一个方程组。为了更好的表达,我们引入随机邻接矩阵M:
而原来的 PageRank 方程可以写成:
也就是说,PageRank向量$r$是矩阵$M$的一个特征向量,对应特征值为 $1$。
因为M是列随机矩阵(每一列的和为 $1$),所以最大的特征值就是1。那么现在问题变成了求M的最大特征值的特征向量。
可以用幂迭代:
初始化一个归一化的随机向量 $r$;
不断更新:
直到收敛。
并且M是稀疏矩阵(sparse),实际计算时只需要考虑每个节点的入邻居,而不是构造一个完整的巨大矩阵。
还可以把网页跳转理解成是一个markov chain,下一步跳转的网站只取决于当前在哪个网页:
为了保证随机游走有唯一稳定的长期分布,图需要满足2个条件:
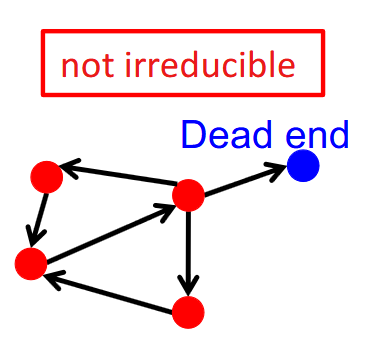
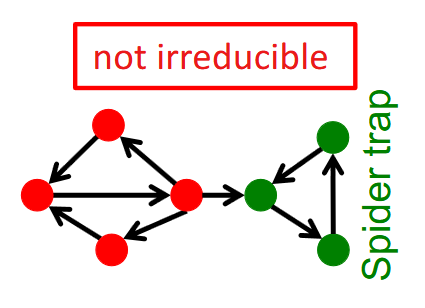
不可约,irreducible:从任意状态都可以到达任意其他状态。
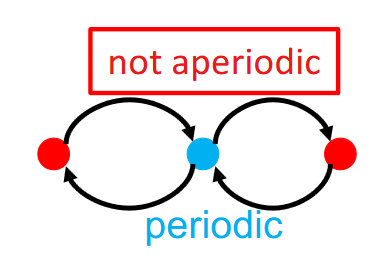
换成网页图,就是从任何网页出发,都有路径能到达其他网页。非周期,aperiodic:状态不会只能以固定周期返回自己。
如果一个状态只能每隔 3 步、6 步、9 步回到自己,那么它就是周期性的。
在irreducible的Markov chain里,只要有一个状态是非周期的,那么所有状态都是非周期的。
普通的PageRank 会遇到的三个问题。
第一,dead ends,死胡同节点。有些网页没有出链,随机游走走到这里就“无路可走”,导致重要性泄漏出去。
第二,spider traps,蜘蛛陷阱。某一组网页的所有出链都指向组内,随机游走一旦进入这个集合,就出不来了,最终这些节点会吸收所有重要性。
第三,periodic states,周期状态。如果从某个状态出发只能以固定周期回到它自己,随机游走可能不会稳定收敛,而是来回震荡。
所以,单纯沿链接随机游走还不够,需要一个修正机制。
Random Teleports
随机冲浪者在每一步有两个选择:
- $\beta$的概率沿着一个随机出链继续走;
- $1-\beta$的概率跳到某个随机页面。
于是 PageRank 公式变为:
矩阵形式为:
最终求:
带随机传送后,矩阵 $A$ 会变成稠密矩阵,因为随机传送意味着每个节点都可能跳到任意节点。所以不能用稠密矩阵来直接来计算PageRank,而是先计算稀疏M的部分,然后再加上常数项。
但PageRank也有一些问题:
PageRank 衡量的是通用流行度,不一定适合特定主题。例如一个体育主题下的权威网页,未必在全网 PageRank 很高。
解决思路是Topic-Sensitive PageRank。
PageRank 容易受到 link spam 影响。有人可以人为制造链接结构,提高目标网页 PageRank。
解决思路是TrustRank。
PageRank 只有单一重要性分数,但现实中“重要性”可能有多种定义。
- 解决思路包括Hubs-and-Authorities (HITS, Hyperlink-Induced Topic Search)等。
Topic-Sensitive PageRank的思想是:随机传送时,不是跳到所有页面,而是跳到某个主题相关页面集合 $S$。例如,如果用户搜索体育内容,就让随机冲浪者更可能跳到体育相关页面;如果用户搜索历史内容,就跳到历史相关页面。这样得到的 PageRank 不再是全局流行度,而是主题相关重要性。
矩阵形式可以写成:
其中 $\pi$ 是 teleport vector。如果是主题集合 $S$,那么:
还可以进一步推广到任意 teleport vector $\pi$,只要满足 $\sum_i \pi_i = 1$即可。
TrustRank的思想是:用可信网页作为 teleport set,做一种 topic-sensitive PageRank。例如使用 .edu 域名,或者非美国学校的类似可信域名。这样随机传送主要从可信页面出发,垃圾链接农场就不容易凭空获得很高权重。
Clustering
输入是一个图 $G=(V,E)$,目标是把顶点 $V$ 分成若干个 cluster。图聚类主要根据对象之间的关系聚类,也就是边所表达的连接信息。
一个“好”的图聚类通常满足两点:同一个簇内部有很多边,也就是 intra-cluster edges 多;不同簇之间只有少量边,也就是 inter-cluster edges 少。
Clustering的算法大致可以分成2种:
- partitioning approaches 要求每个节点恰好属于一个簇;
- non-partitioning approaches 允许簇重叠,也允许有离群点不属于任何簇。
我们这里主要关注weighted undirected graphs 上的 non-overlapping clustering。
可以把问题转换成优化问题:给定图 $G=(V,E)$,把顶点集 $V$ 分成 $k$ 个簇 $\mathcal C=\{C_1,\dots,C_k\}$,
(disjoint union)。
Minimum Cut
考虑2个cluster的情况:把图分成两部分 $C_1,C_2$,让跨越两个簇之间的边权总和尽可能小。这个量叫 cut:
但是minimum cut 有严重缺陷:它倾向于把很小的一组节点,甚至单个节点,从大图中切出来,因为这样跨簇边可能最少;而且它只关心 inter-cluster edges,没有考虑簇内部是否紧密。
所以可以引入归一化cut标准:
其中 $\text{vol}(C)$ 是节点集合的 volume,即集合内所有节点度数之和。
但是当cluster数量上来了之后这个问题便变成了NP-hard的问题。
换个思路,我们可以把它变成一个labeling的问题:对每个节点 $v$,赋予一个标签 $f_v$ 表示它属于哪个簇。二分类时,可以令 $f_v\in\{+1,-1\}$。聚类目标是让标签函数 $f$ 在图上“平滑”:相邻节点的标签应该相似。于是可以最小化:
如果一条边权重大,而两个端点标签差异大,那么惩罚就大。这个目标强迫连接紧密的点有相似标签。
定义图拉普拉斯矩阵(Laplacian matrix):
即
其中 $W$ 是加权邻接矩阵,$D$ 是(加权)度矩阵($D_{ii}=\text{deg}(i)=\sum_jW_{ij}$)。对无向图,$W$ 对称,$D$ 是对角矩阵。
拉普拉斯矩阵(Laplacian matrix)有几个重要性质:
1.
刚好可以把我们刚才的目标函数(objective function)转改写成矩阵的乘法。
证明:
注意到:
所以
$\square$
2. Laplacian是additive的:
3. $L$ 是对称半正定矩阵(symmetric, positive semi-definite)
4. $L$ 的最小特征值是 0,对应的特征向量是全 1 向量 $\mathbf 1$,或者任意常数倍 $c\mathbf 1$。
证明0是最小的特征值:
设 $x$ 是 $L$ 的任意一个特征向量,对应特征值是 $\lambda$:
两边左乘 $x^\top$:
也就是:
所以:
5. $L$ 有 $n$ 个非负实特征值:
来看2个cluster的情况。考虑min RatioCut:
定义一个比较奇怪的indicator vector $f_{C_1}$:
但它有些非常重要的性质:
1. ,也就是$f_{C_1} \perp \vec{1}$
2. (长度是常量)
3.
当我们给$f$的要求放宽松一点,只要求它满足1,2这两条性质,那么就可以把问题变成:
注意到,对于所以的对称矩阵$L$都有:
所以上面优化问题实际上要找到$f_{C_1}$实际上就是$L$第二小的eigenvector。
那么最后怎么通过$f_{C_1}$来还原cluster呢?
- 2个cluster的情况直接考虑$f_{C_1}$的符号即可
- 多个cluster就需要基于$f_{C_1}$的值做一个k-means clustering。
现在再推广到cluster数量$k>2$的情况。
对每个簇 $C$,定义一个 indicator vector:
然后把这些向量作为列拼成矩阵:
不难注意到:
所以
同样,问题就变成了:
如果我们给H的条件放宽松一点,那么就是
类似的,最优解H就是L的前k个最小eigenvectors,因为:
设 $L$ 的特征分解为:
其中:
并且:
目标函数是:
代入特征分解:
令:
因为 $U$ 是正交矩阵,且 $H^\top H=I$,所以:
目标变成:
并且
所以$\text{trace}(Y^\top \Lambda Y)$的最优解就是
然后再带回去原问题:
spectral embeddings
$H \in \mathbb{R}^{n \times k}$的列向量是L的前k个eigenvector,然后行向量就是每个node的embedding。
按照一开始严格的H要求,得出来的每个行向量应该只有1项是不为0的,表示cluster。即便是后面没有严格要求了,这些向量依旧能携带cluster信息。
可以针对这些embedding做k-means确定每个的label/cluster。
Modularity
前面cut-based 方法的一个局限是:通常需要提前知道簇数 $k$。
而modularity 的核心思想是:不直接看簇内边有多少,而是比较“实际簇内边数”和“在随机图里期望的簇内边数”差多少。
Probabilistic Approaches
Prediction
图上的预测问题可以分成几个层级:
- 节点级任务(node-level):预测单个节点的属性或标签。
- 图级任务(graph-level):预测整张图的属性。
- 边级任务(edge-level):可以预测已有边的属性,也可以预测新边是否可能存在。
学习任务也可以分成几种:
Transductive learning:只预测当前给定的未标注样本
给定一批有标签训练样本 $T$,一批无标签测试样本 $U$,以及可能存在的额外知识,比如图结构 $W$。目标不是学习一个可以泛化到任意新样本的函数,而是只预测当前这批无标签样本 $U$ 的标签。
Inductive learning:学习一个可泛化的预测函数
学习一个映射 $f:\mathcal X \to \mathcal Y$,它可以应用到未来新来的样本 $x_{new}$。图级任务往往是 inductive 的。
此外还有一个概念Semi-supervised learning:同时利用有标签和无标签数据训练。
transductive learning 几乎总是 semi-supervised,因为我们明确拿到了有标签节点和无标签节点,并且目标就是利用所有这些数据来预测无标签节点。
但图是离散结构,传统机器学习通常处理固定长度向量。那么,怎样把图上的节点、边、整张图变成机器学习模型能处理的形式?
答案主要有两类:
第一类是 embedding,显式地把节点或图映射成向量;第二类是 kernel methods,不一定显式生成向量,而是直接定义两个对象之间的相似度函数。
Embedding
Node embedding:把图变换成一种表示,使每个节点都对应一个向量。形式上,节点嵌入函数是
也就是把每个节点映射到 $d$ 维实数空间。embedding 空间里距离近的节点,应当在图结构意义上“相似”。
embedding 没有唯一标准。不同方法的差异在于:如何定义 embedding 空间中的“相似”,以及想捕捉图的哪种性质。
可以粗略地分为2类:
- Spectral embeddings:节点相似通常意味着它们属于相同 cluster。
- Deep embeddings:相似性取决于 loss function 和模型结构。
Spectral embeddings
详见前面clustering那章的Spectral embeddings。
Deep embeddings
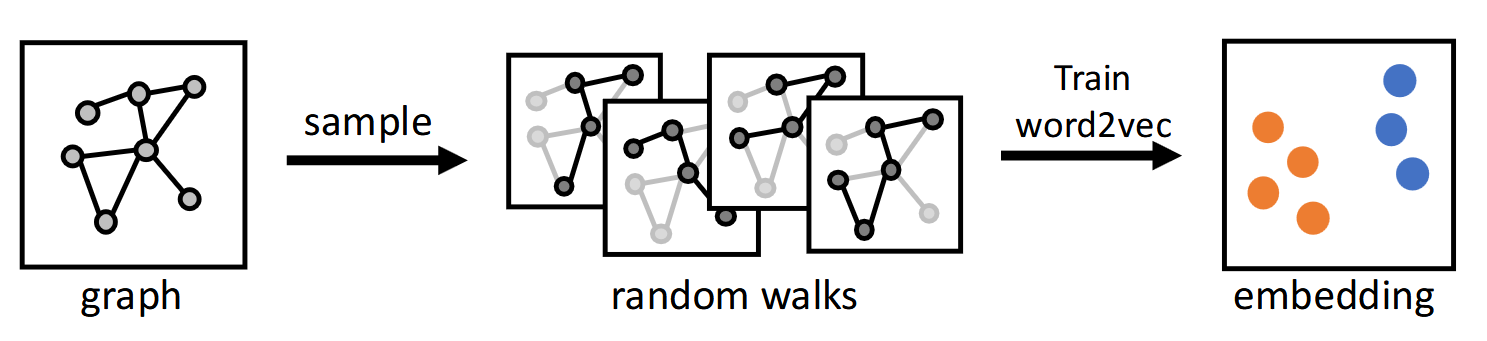
DeepWalk:把图变成一组 random walks(也就是sequence of tokens),然后在这些随机游走序列上训练 word2vec。对每个节点 $v_i$,采样多条随机游走;这些 random walks 相当于 word2vec 里的句子,而节点 ID 相当于词。
训练完成后,在图中距离近、共享邻居多的节点,会得到相似的向量表示。
Graph2Gauss:把节点映射成embedding空间中的一个高斯分布。目标是让一个节点的一阶邻居比二阶邻居更近,二阶邻居又比更远的节点更近,也就是保留图中的距离排序。(暂时先不考虑边权)
它学习一个映射:
对于 attributed graph,$x_i$ 可以是节点特征;对于 plain graph,$x_i$ 可以是节点 ID,比如 one-hot 编码。
mean $\mu_i$表示节点在embedding space中的大概位置,而variance $\Sigma_i$表示不确定性。
用 KL divergence 来衡量两个节点对应的高斯分布的差别有多大(embedding的距离):
Graph2Gauss 的 inductive 能力依赖于 $x_i$。
如果 $x_i$ 是真实节点属性,那么模型可以泛化到新节点。
但如果 $x_i$ 只有 node ID 或 one-hot encoding,那么模型更多是在记住训练图里的节点,泛化能力就弱很多。
更进一步,如果两个节点 $u$ 和 $v$ 有完全相同的属性 $x$,但在图中距离很远,那么会出现一个问题:
- 如果输入只看属性 $x$,它们输入一样;
- 同一个函数 $f_\theta$ 对一样的输入可能输出一样或非常相近的高斯分布;
- 但图结构却要求它们离得远。
所以核心trade-off是:
- 用节点属性做输入,inductive能力强,但可能区分不了属性相同、结构位置不同的节点;
- 用node ID / one-hot做输入,可以区分节点,但inductive泛化能力变弱。
Graph embedding
自然想法是:先算出每个节点的 embedding,再把所有节点 embedding 聚合成一个 graph embedding。问题是,不同图的节点数不同,直接拼接节点向量会导致维度不一致。PPT 给出的解决方法是:聚合所有节点 embedding,例如 mean pooling。
也就是说,如果一张图有 $n$ 个节点,每个节点embedding是 $d$ 维,那么可以取平均:
其中
表示图$G$中第$i$个节点的embedding;
这样无论图有多少节点,最终都得到一个固定长度的 $d$ 维图向量。然后就可以把这个 graph embedding 输入 SVM、神经网络等模型。
除此之外还有其他聚合的方法:
保留规模信息,因为节点越多,sum 通常越大。
保留某些最强激活特征,但也不直接保留数量。
Kernel methods
很多算法只依赖内积 $\phi(x)^T\phi(x’)$,所以我们不需要真的算出高维特征 $\phi(x)$,只需要找到一个 $k(x,x’)$ 满足:
然后后续直接计算$k(x,x’)$即可。不再需要先embedding然后再计算inner product。
Graph kernel methods的思路非常类似:与其像 embedding 方法那样显式学习 $\phi(G)$,不如直接定义两个图之间的相似度函数:
也就是输入两张图,输出它们有多相似。
graph kernels 通常通过共享结构模式来衡量相似性,例如 random walks、substructures、Weisfeiler-Lehman labels。它们主要用于 graph-level tasks,但也存在 node-level kernel。
Label Propagation
之前是先把图转换成向量,然后再用机器学习的模型。我们也可以直接在图结构上做节点分类/transductive node classification:给定一张图,其中一部分节点有标签,另一部分节点没有标签,目标是在同一张图上预测未标记节点的标签。
核心假设叫homophily/assortativity,也就是物以类聚,人以群分”:如果两个节点有边相连,那么它们更可能拥有相同标签。
先考虑二分类情况。formal的定义:
- 节点$V = S \cup U$(S: seed,labeled;U: unlabeled)
- 对称加权邻接矩阵(Symmetric weighted adjacency matrix)$W \in \mathbb{R}^{|V| \times |V|}$
- 已标记节点 $i \in S$ 的标签记作 $\hat y_i \in \{0,1\}$
- 希望预测所有节点的标签 $y_i$,$i \in V$。
和之前cluster的思路类似,定义Energy:
那么整体的问题便变成了一个constrained integer optimization problem:
也可以改写成图拉普拉斯矩阵的形式:
其中:
是graph Laplacian,$D$ 是度矩阵,$W$ 是邻接矩阵。
当把图拉普拉斯矩阵按照 labeled nodes 和 unlabeled nodes 分块:
标签向量也相应分块:
其中 $\hat{\mathbf y}_S$ 是已知的 seed labels,$\mathbf y_U$ 是要学习的未标记节点标签。
在$L_{UU}$可逆的情况下,不难得到最优解:
证明:
首先
因为 $L$ 是对称矩阵,所以
因为$\mathbf y_S$是已知的,所以其中真正需要最小化只有:
对$\mathbf y_U$求偏导得到:
$\square$
而想要$L_{UU}$可逆也并不困难:
Theorem:
证明:
对任意 $\mathbf z\in\mathbb R^{|U|}$,有:
W.l.o.g这里可以把 labeled nodes 上的值设成 0,unlabeled nodes 上的值设成 $\mathbf x$。
由于 graph Laplacian 的二次型是边上差异的平方和:
所以:
其中:
考虑$\mathbf x^T L_{UU}\mathbf x=0$的情况:
意味着每一条正权重边两端的 $z$ 值都必须相等。
如果每个连通分量都至少包含一个labeled node。那么这个连通分量里的所有node的label也都需要等于这个 labeled node,也就是$x=z=0$。所以$L_{UU}$可逆。
如果某个连通分量没有 labeled node,那么就存在一个$x \neq 0$使得$\mathbf x^T L_{UU}\mathbf x$,代表$L_{UU}$不可逆。
$\square$
那有$K$个类别的情况该怎么办?答案是使用 one-hot notation:
也就是说,每个节点不再只有一个标量标签,而是一个 $K$ 维标签向量。多分类下的能量函数变成:
经典 Label Propagation 通常假设 homophily,也就是相连节点倾向于同类。但 图中也可能存在其他网络效应,例如 heterophily,即“异类相吸”。
为此,可以引入一个compatibility matrix:
然后能量函数变为:
Soft constraint
我们前面考虑的都是hard constraint:seed 节点标签必须完全等于给定标签。
但我们还可以考虑soft constraint的版本,即seed labels 不再是绝对固定,而是通过一个正则项鼓励模型接近它们:
目标函数里有两部分:
第一部分仍然是图平滑项,要求连接节点的预测结果接近;
第二部分是 label fitting 项,要求预测结果 $F$ 接近给定标签矩阵 $Y$。
Y每行是 seed nodes 的 one-hot 向量,非 seed 节点对应零向量;$\mu$ 是正则化参数;$d_i$ 是节点度。
其解析解是:
其中:
Attributed Graphs
前面的Label Propagation主要依赖图结构和部分标签。但现实中很多图还有节点特征,例如社交网络用户的年龄、文本、兴趣向量,论文网络中文章的关键词向量等。
这种图为attributed graphs:每个节点除了图结构之外,还有一个特征向量:
同时部分节点有标签 $Y$。问题变成:能不能同时利用节点特征、标签和图结构?
PPNP
PPNP的全称是Personalized Propagation of Neural Predictions。
它的核心思想是:
Predict then Propagate,也就是先用节点特征做预测,再把预测结果沿图扩散。
第一步:Predict。
对每个节点 $i$,用神经网络 $f_\theta$ 根据节点特征 $X_i$ 预测初始类别概率:
这里 $f_\theta$ 是可学习的 neural network。

第二步:Propagate。
不是传播原始标签,而是传播神经网络的预测结果 $H^{(0)}$。最后的类别预测结果:
其中 $\tilde A$ 和 $\tilde D$ 是加入 self-loops 后的邻接矩阵和度矩阵。
注意到这部分可以展开成无穷级数:

直观上,PPNP做了两件事:
- 神经网络负责看节点自己的特征;
- Personalized PageRank扩散负责结合图结构,让相邻或相近节点的预测互相影响。
PPNP的训练目标是:只在有标签的节点上计算 $Z$ 和真实标签 $Y$ 之间的 cross entropy loss。然后通过backpropagation端到端训练神经网络参数 $\theta$。
APPNP
Approximate Personalized Propagation of Neural Predictions。
PPNP 的精确解里有矩阵逆:
大图上直接算这个很贵。所以可以利用随机游走迭代近似精确 Personalized PageRank 解:
GNN
很多图预测任务不能只看节点特征,还必须看复杂的结构关系。
GNN的核心idea:让模型端到端地学习节点特征和图结构应该如何结合。
一个核心约束是Permutation Invariance,置换不变性。同一张图如果只是重新编号节点,本质上没有变;因此图级预测模型的输出不应该依赖任意节点排序,即应满足:
不能简单把邻接矩阵当图片处理,因为节点顺序是任意的,而且也不希望引入 $O(n^2)$ 的复杂度。
CNN中的idea是:在图像中,一个像素的新表示受自己和邻居像素影响,同时卷积核参数共享。
可以把它泛化到图卷积NN(Convolutional Neural Networks for Graphs):一个节点的新表示应该由它自己和邻居的旧表示共同决定,并且所有节点共享同一套更新规则。
和sequences/images不同,图上可以定义很多种不同的卷积。目前文献中最常见两类是:
- Spatial GNNs:空间视角,直接在图上做可微消息传递。
- Spectral GNNs:谱视角,借助图信号处理和谱滤波定义卷积。
Spatial GNNs
Spatial GNN 的核心是 message passing,消息传递。对于图 $G=(V,E,X)$,每个节点 $v$ 在第 $t$ 层有隐藏表示 $h_v^{(t)}$,初始表示通常是节点特征:
每一层更新为:
节点$v$收集邻居$w$的上一层表示,先聚合,再和自己的旧表示一起更新。

- $upd^{(t)}$ 可以是任意可微函数,例如神经网络
- 同一层中所有节点共享权重
- 这个过程不依赖节点顺序
第$K$层之后,节点表示会包含$K$-hop邻域的信息。
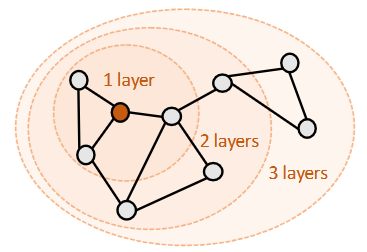
所以GNN的深度(depth)同时有2种理解:
- transformation depth,即非线性变换堆叠多少层
- propagation depth,即信息在图上传播了多远
2个实例:
1. GCN 使用带度归一化的邻居求和:
度归一化的目的是防止高度节点的聚合值过大,也和归一化 Laplacian 有关。
可以写成矩阵形式:
其中 $\tilde{A}=A+I_n$,即加了自环;归一化传播矩阵可以避免梯度爆炸。
2. GraphSAGE 则是把“自身信息”和“邻居均值信息”分别做变换:
它的特点是把 self-message 和 neighbor-message 分开建模。
Spectral GNNs
先定义归一化 Laplacian:
并进行特征分解:
其中 $U$ 的列是 Laplacian 的特征向量,$\Lambda$ 是特征值对角矩阵。
图信号可以看作定义在节点上的函数 $x:V\to \mathbb{R}$,即一个向量 $x\in \mathbb{R}^N$。Graph Fourier transform (GFT)定义为:
逆变换(inverse GFT)为:
图上的谱滤波(spectral filtering on graphs)则写作:
其中$g$是spectral filter,会把$\Lambda$映射到对角矩阵。
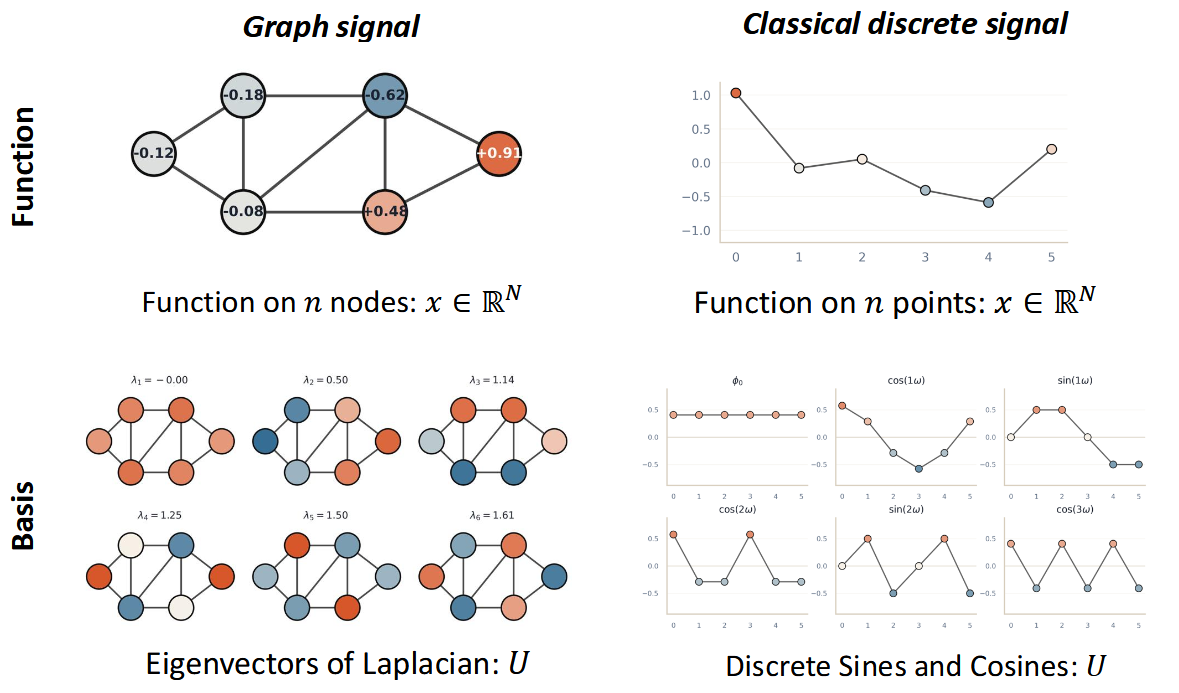
信号处理中的傅里叶的那些$cos(k\pi)$和$sin(k\pi)$是orthonormal basis,矩阵$U$里的列向量也是orthonormal basis。
Spectral GNN的main idea就是把spectral filter$g_\theta$当作参数。每层的更新公式:
Spectral propagation$Ug_\theta(\Lambda)U^T$ 可以一次覆盖多个 hop,因此和逐层局部传播的message passing视角不同。
但直接做特征分解代价高,所以常用多项式滤波器:
这样可以避免直接使用U来计算:
因为
Spectral GNN的几个问题:
- 计算复杂度高。原始的Spectral GNN需要对图Laplacian做谱分解,但可以用多项式滤波或类似power iteration的更新方案避免完整特征分解。
- Receptive field不同。Spectral GNN原则上可以让图信号传播到整个图,但局部多项式滤波仍然只作用在局部。
- 可迁移性困难。spectral filter是在某一张图的spectrum上定义的,改变一条边都可能显著改变spectrum,因此把滤波器迁移到新图并不总是容易。
预测任务
半监督节点分类(Semi-Supervised Node Classification)
在 transductive node classification 中,图已知,只有一部分节点 $S\subseteq V$ 有标签。做法是把最终层节点表示 $h_v^{(K)}$ 当作 logits,用 softmax 得到节点属于每个类别的概率:
然后只在有标签节点上计算交叉熵损失:
其中$y_{vc}$是one-hot encoding。
也就是说,无标签节点参与消息传递,但损失只在有标签节点上算。
图分类
对于 graph classification,训练集是一组图 $G_i=(V_i,E_i)$,每个图有图级标签 $y_{G_i}$。
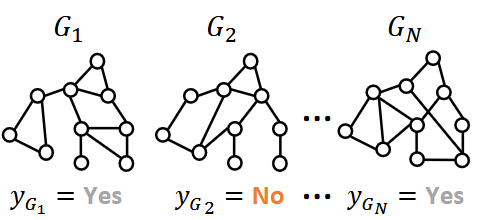
GNN 先给每个节点产生表示,再用(定义出来的)图级聚合函数 $R(H_{G_i})$ 得到整个图的表示:
GNN 的理论限制
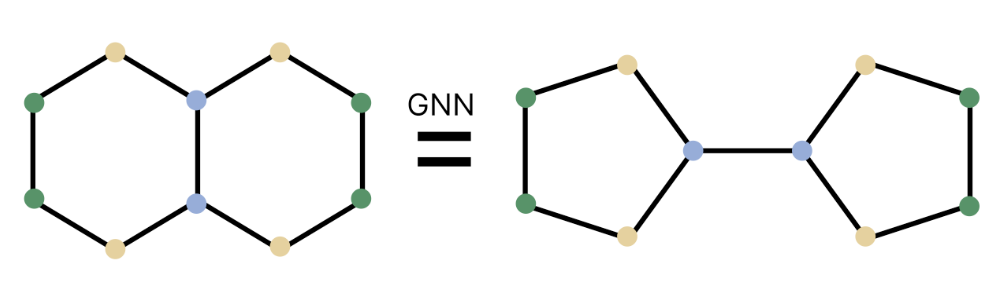
Expressiveness(表达能力:GNN 能区分所有图吗?)
答案是否定的。存在非同构图 $G_1,G_2$,无论参数如何选择,message passing GNN 都无法区分它们。
Oversmoothing(层数太深会把节点表示抹平)
当层数趋于无穷时,影响会趋近于图作为 Markov chain 的 stationary distribution,这是一种全局性质。结果是某个节点会以几乎相同方式影响所有其他节点,距离信息被冲淡,深层 GCN-like 网络难以保持局部邻域结构。
简单来讲就是,传播太多轮后,大家的embedding越来越像,节点之间失去可区分性。
Oversquashing(远距离信息被压进固定维度瓶颈)
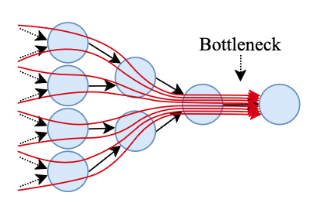
Oversquashing 指 GNN 难以把长距离信息有效传过来,主要原因是指数级增长的信息量被压缩进固定大小的节点表示里,因此当任务需要长程依赖时,GNN 预测性能可能很差。
Graph Transformers
大多数 spatial/spectral GNN 只沿图边传递信息,所以我们也可以用Transformer结构,让图上的所有节点之间做multi-head attention。
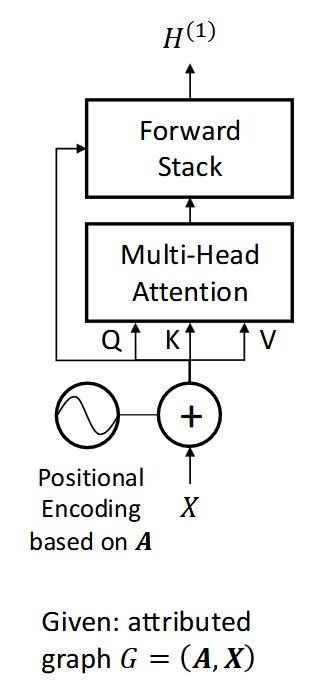
Graph Transformer 的核心结构是:节点特征 $X$ 加上基于邻接矩阵 $A$ 的 positional encoding,然后做多头注意力和前馈网络。关键挑战是:图不像序列有自然位置,如何定义好的节点位置编码?
有2种常见的:
- 基于 Graph Laplacian 特征向量的 spectral encoding
- 基于随机游走返回概率的 random-walk encoding。